工学部 ロボティクス学科
太田和彦 研究室
OHTA Kazuhiko
LABORATORY
水中ロボットに最適なセンシングと水中音響による通信制御の実現を目指して
水中生物は陸上生物とは異なる優れたセンサ・知覚能力を備えており、そのセンシングやメカニズムを参考に新たな水中ロボットの研究を進めている。光や電波は水中における伝搬時の減衰が大きいのに対し、遠方まで伝わりやすい音波を上手く利用して水中生物はセンシングやコミュニケーションを図っており、その特性を反映させた機能・性能を水中ロボットに導入できればと考えている。
キーワード
- 水中センシング
- 水中ロボット
- 音響通信・信号処理
ニュース&トピックス
NEWS & TOPICS
- 2024.02.27「物語の始まりへ」に山本健介さんが紹介されました
- 2023.03.28石井新さんが「令和4年度 土木学会中部支部研究発表会」で「優秀講演者賞」を受賞
- 2021.08.03「物語の始まりへ」に篠田瞭太さんが紹介されました
研究紹介
RESEARCH
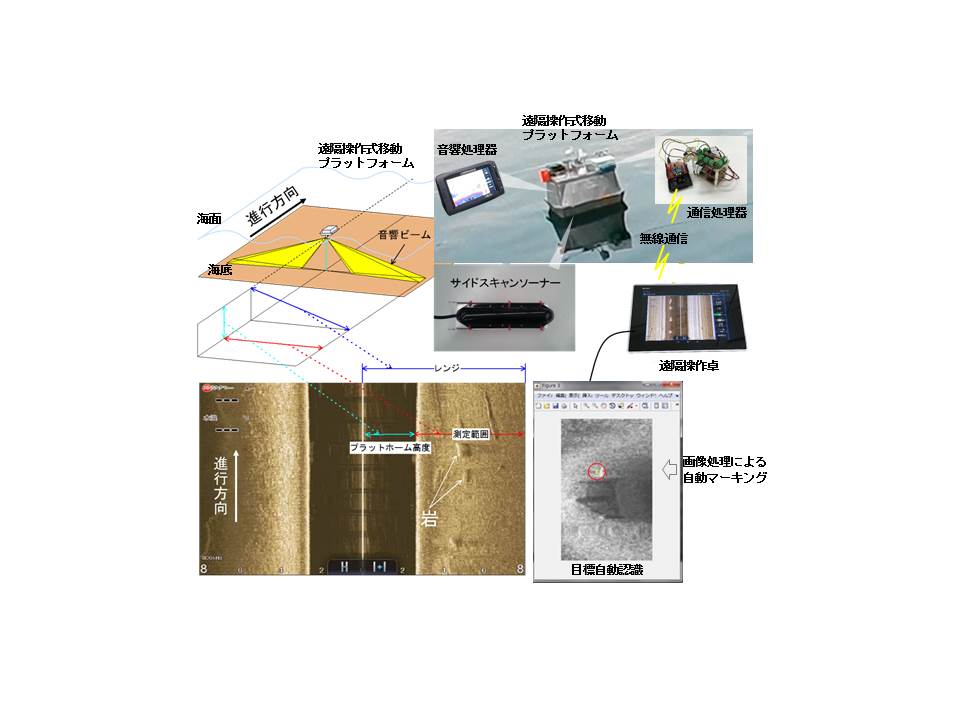
音響画像を用いた水中目標検出のための小型水上ROVに関する研究
研究内容
水中では光波や電波による捜索が困難な目標物の位置同定のため、遠隔操作可能な移動式小型プラットホームにサイドスキャンソーナーを搭載させてリモートセンシングし、その出力の音響画像から目標を自動検出、これにアプローチできるような捜索用水上ROV(Remotely Operated Vehicle)に関する研究を進めている。この試作器による水槽実験及び穴水自然学苑での海上実験から水中や海底上の静止目標の検出は可能であることを確認した。今後は目標が移動した場合に、その補足探知と追尾を可能とさせるような制御システムについて検討し、将来的には遠隔操作ではなく自律的に移動目標を探知・トラッキングできるような自律型ASV(Autonomous Surface Vehicle)システムの実現を目指す。
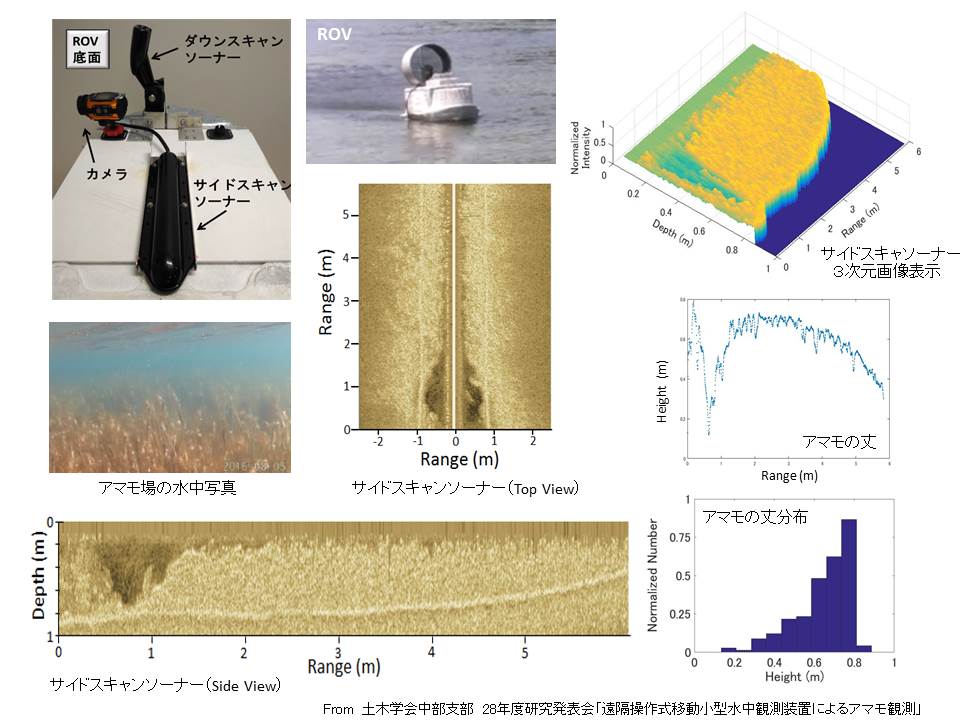
水中探索用遠隔操作式小型船(ROV)を利用したアマモ群生域把握のための研究
研究内容
アマモは沿岸砂泥地の水深数m以浅の浅い海域に群生するイネ科と同じ顕花・種子植物で、水質を浄化させることから海辺環境の指標となるだけではなく、魚類や頭足類の産卵場所や稚魚の生育場所を提供するため水産資源確保の観点からも重要である。しかしながら、近年、護岸工事や沿岸域の埋め立てなどにより全国的にアマモ場は減少しており、この復元のための試みや実験が国内各所で行われつつある。石川県においては七尾市能登島向田町にアマモの群生している沿岸があるため、当該研究室で開発した水中探索用遠隔操作式小型船(ROV)を用いたアマモ場の調査についてその有効性を検討している。写真は平成28年8月に能登島曲海岸で海上実験を実施し得られた調査結果の一例である。サイドスキャンソーナーの適用により水中ビデオカメラでは把握し難いアマモの丈分布等が確認された。今後、各種ソーナーを組み合わせ、ROVによるアマモ群生エリアの把握に活用させていく予定である。
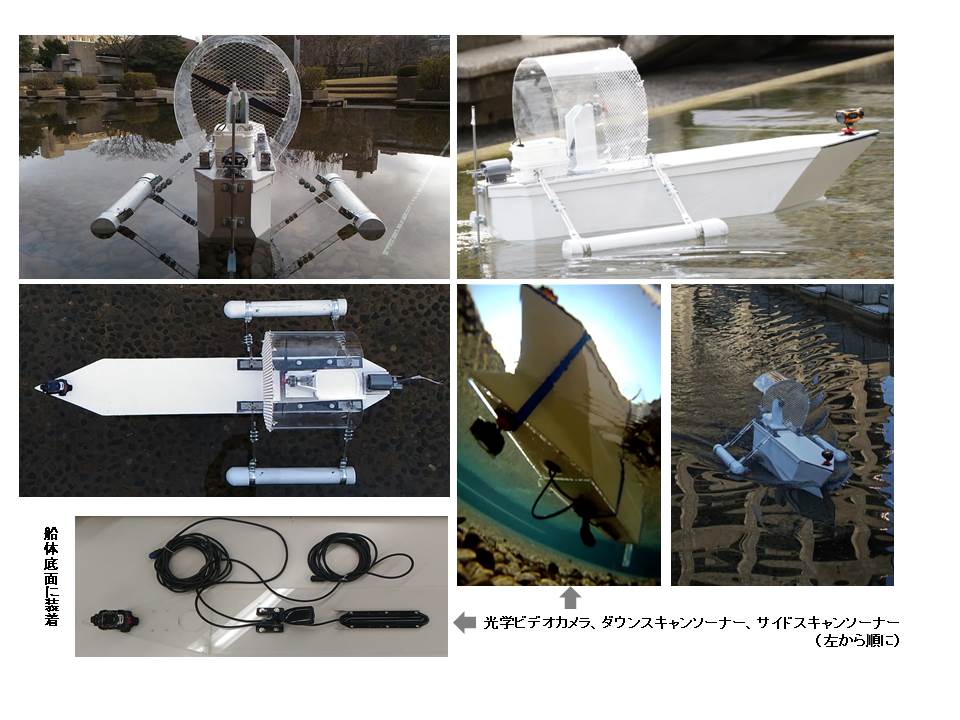
水中探索用トリマラン型遠隔操作式小型船(ROV)に関する研究
研究内容
前年度試作したモノハル型水中探索用ROVを穏やではない海面上を航走させると、ROV船底にマウントされた音響画像用ソーナー(サイドスキャンソーナー、ダウンスキャンソーナー)は船体の動揺に伴って音響ビームが不安定となり出力画像も劣化する。このため、船体形状をトリマラン型船体(三胴船)として安定性を向上させるとともにFRPを用いて船体の強化を図った。また、ROVの推進にプロペラを用いると水中で雑音が発生し、ソーナーの音響性能を低下させるため、モノハル型の場合と同様、プロペラ(直径:15インチ)による空力推進を採用し、一方、低速域での旋回性能を確保するためシリングラダー形状の水中舵をとりつけ、プロペラと水中舵を無線通信で制御し遠隔操作の可能なトリマラン型ROVを試作した。今後、本トリマラン型ROVを用いて海上実験を行い、各種ソーナー及び光学ビデオカメラの組み合わせによる水中探索能力の向上を確認する予定である。
水中音波のマルチパス伝搬を利用した音源位置同定の研究
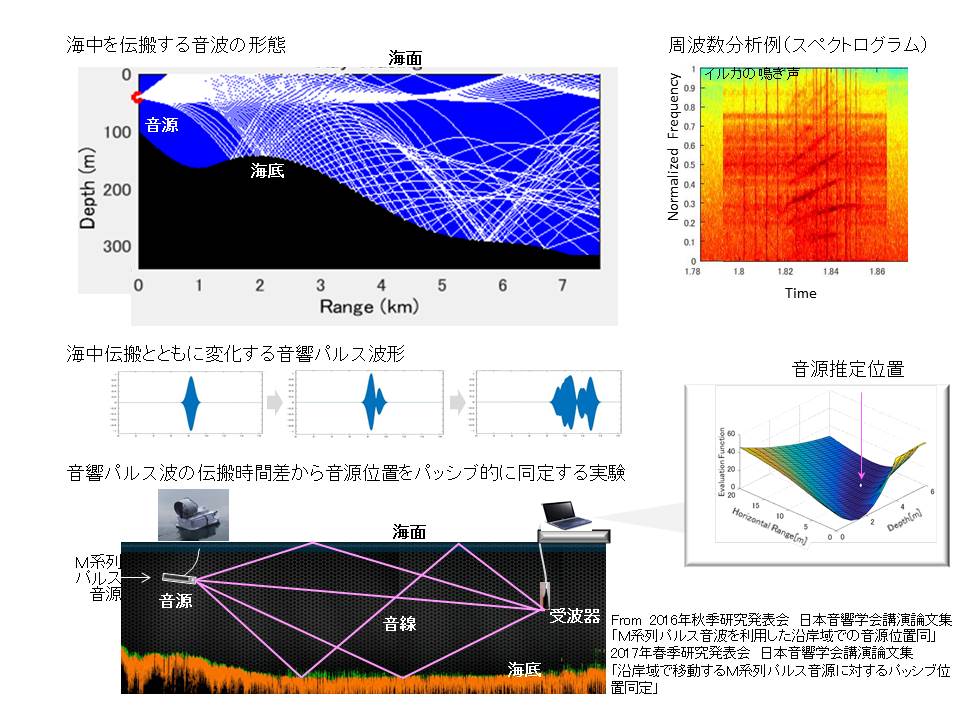
研究内容
海中における音波の伝わり方は海水温や海底地形等海洋環境に応じて異なり、また音波の伝搬(群)速度も周波数によって異なることから、音響パルス信号も海中を伝搬する過程で大きく変化する。このような海洋環境下、特に浅海域において水中探査ロボット等の目標位置を同定するため,多経路伝搬に伴う複数の受信パルス信号の分別が必要となる.このためM系列信号の送波が可能な音響機器を利用することで、相関処理から受信信号のS/Nが改善できるとともに複数のマルチパス信号の分別が可能となる.本研究では伝搬経路の異なるマルチパス信号を利用し,直接波と海面反射波及び海底反射波間の伝搬時間差から、目標(音源)までの距離と深度を同定する方法について海上実験によりその有効性を確認した。今後は様々の海洋環境下で実験を行うとともに、移動音源の位置同定についても上記手法の有効性を確認する予定である。
合成開口音響アレイを利用した水路管の探傷に関する研究
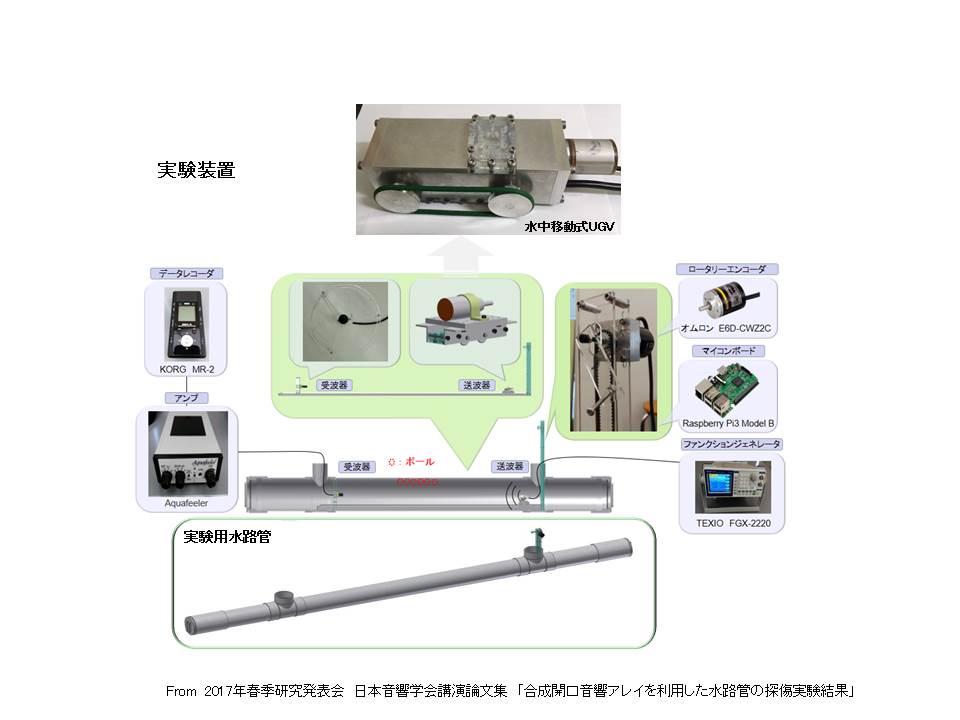
研究内容
水路管の探傷のため、通常用いられている管径方向に超音波パルスを照射する方法は探傷範囲が限定されるため逐次照射・処理を繰り返し移動する必要があり、長い水路管には時間を要することになる。このような探傷時間を軽減するために単一周波数の連続波を用い、音源を管路方向に移動させて合成開口アレイを管内で形成し、その出力より計測される管路方向の波数スペクトルの変化から、水路管の損傷個所をより迅速に特定する方法について検討し、将来的には自律的に探傷を可能とさせる水中移動式自律型UGV(Autonomous Ground Vehicle)システムの実現を目指す。
音響信号制御を用いた遠隔操作式水中ドローンに関する研究
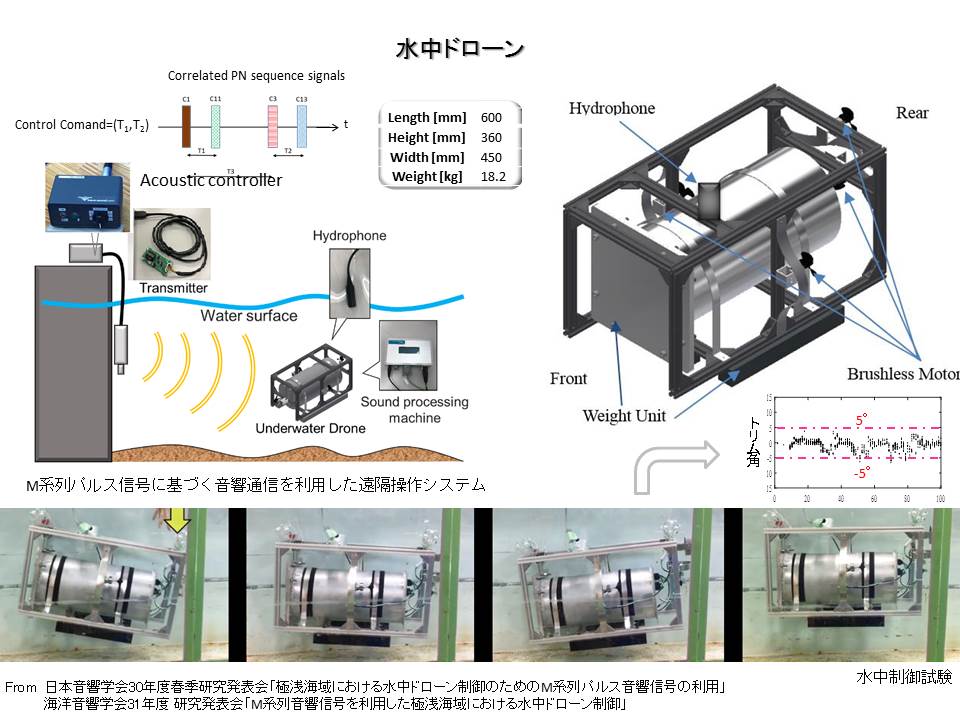
研究内容
遠隔操作で水中ドローンを制御する際、有線通信では運用上多くの制限を受ける。このため、M系列音響信号を利用した無線通信による遠隔操作可能な水中ドローンの研究を進めており、受信された音響コマンドに基づき潜航浮上用・推進用等複数の小型水中モータの回転数や正・逆転を個別に制御しドローンを操作する。潜航浮上はドローン後端部に取り付けたスクリューにより稼働させるが、このとき同時にトルクが発生するためドローンに回転が生起する。これを回避するため前後方向に移動可能なバラストを筐体内に設置し、傾斜センサの出力に応じたマイコンのモータ駆動制御によりバラストが前後に移動しドローンの姿勢が水平に保たれるような自動制御機構を設けた。今後はドローン側にも各種センサを搭載し、上記のM系列音響信号を用いて操作側に情報を伝達できるようなシステム化を図る予定である。
港湾内における海中不審物の自動検出装置に関する研究
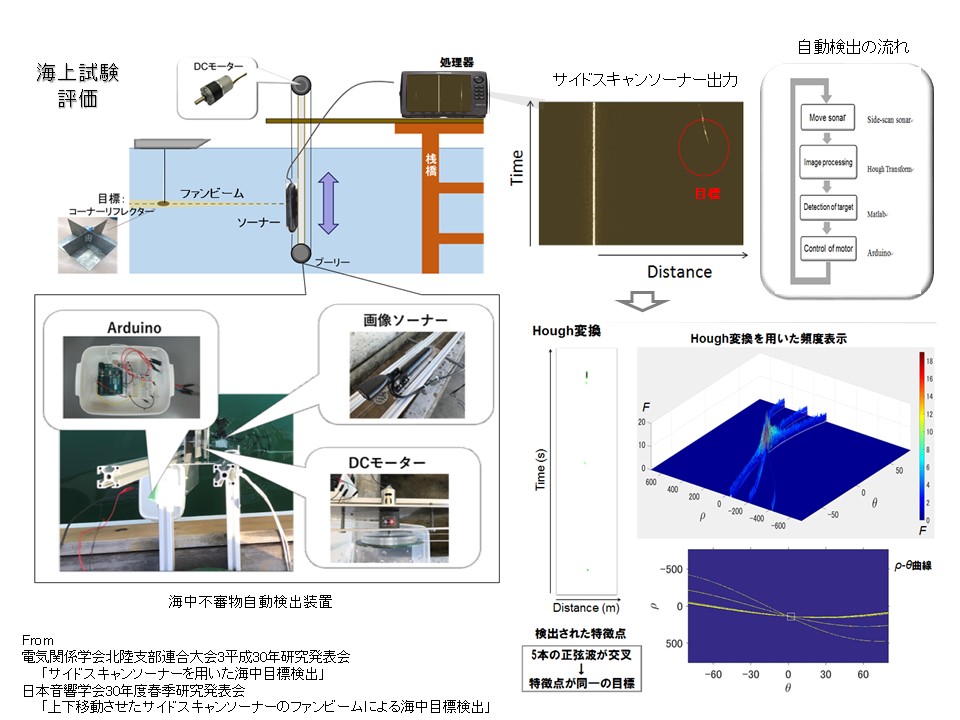
研究内容
港湾内の海中不審物の検出のため、通常は船舶に搭載して運用するサイドスキャンソーナーを、海中に吊架したアルミ製レール上を上下に移動できる台車にとりつけ、不審物が自動探知できるような装置を試作し研究を進めている。一般的に湾内など水深 10 m 前後の極浅海域においては水中を伝搬する音波は屈折や反射だけではなく、海底・海面残響による影響を強く受けるため、指向幅の広い魚群探知機による目標探知は困難である。このため、指向幅が非常に狭いサイドスキャンソーナーのファンビームを水平に向け送信することで残響を低減し、さらにソーナー出力画像へのHough変換の適用による目標自動検出とマイコンによるソーナー深度の自動制御により、目標追随可能なシステムを構築し海上試験により本機能の有効性を確認した。今後は移動目標に対しても対応可能なシステムに改良する予定である。
教員紹介
TEACHERS
太田和彦 教授・Ph.D
略歴
専門分野
専門:制御技術、ソーナー技術、海洋音響信号処理、海洋音響トモグラフィー、水中音響学
学生へのメッセージ
水の中では人間の行動は様々な制限を受けます。そのような環境下で人間に代わって活動できるロボットを実現するため、研究室では水中音波を利用した遠隔操作式の無線水中ドローンや自律移動式の水上プラットホームなどを試作し、水中探査や音響通信等の海上試験を行っています。
与えられたミッションをロボットに達成させるには、センシング・信号/画像処理、動力方式・制御等種々の技術が必要となります。特に、水面・水中では浮力や波などの流体の影響を考慮してロボットの動作を制御する必要があります。また、水中においては光波や電波は減衰が大きく伝わりにくいため、センシングや通信に音波は不可欠なものとなります。
研究室では、これらの試作品を海上試験を通して評価することになります。海上試験は共同作業が必要となるため、学生は個々の責任感に加えて他者との協調性も求められ、試験を通じてそれらを身につける良い機会となります。
担当科目
ロボット基礎力学Ⅰ ロボティクス基礎 ロボット応用力学Ⅱ ロボティクス数理・演習Ⅲ ロボティクス統合演習 プロジェクトデザインⅢ(太田和彦研究室) ロボット基礎力学Ⅱ ロボット応用力学Ⅰ ロボティクス数理・演習Ⅱ EARTH&SPACE環境機械工学研究(太田和彦) 海洋機械工学特論
研究業績
RESEARCH RESULTS
論文
- 時間反転波を利用した管内変形の検出をするための最適周波数の検討
- 極浅海域における高周波音波の伝搬計測及び数値シミュレーションによる検討
- TRM効果を利用した水路管内変形有無の判別法 ~直接波遮断による測定精度向上~
- 音響信号を利用した水中目標への自律追従機能を有する水上無人機の基礎実験
- チャープ信号を用いた時間反転波による水路管変形の検出
- Underwater target detection using a pair of omnidirectional transducers in extremely shallow water
- 時間反転音波を用いた水路管変形の検出のためのスペクトログラムの利用
- USV 搭載のサイドスキャンソーナーを用いた目標識別のための基礎実験
詳しい研究業績はこちら