工学部 航空宇宙工学科
赤坂剛史 研究室
AKASAKA Takeshi
LABORATORY
実運用を目指した小型無人航空機・ヘリコプタ・eVTOL・パラシュート等の研究開発

・小型無人航空機(ドローン)の屋外運用のおける自律飛行及び緊急用パラシュートの実験的研究
・ドクターヘリ等に要求される高速で広範囲に飛行できるコンパウンドヘリコプタの風洞実験・飛行実験及びCFD研究
・空飛ぶクルマの実験的研究。高空風力発電の実験的研究
キーワード
- 小型無人航空機(ドローン)
- コンパウンドヘリコプタ(高速ヘリコプタ)
- 空飛ぶクルマ(eVTOL)
- パラシュート
- 高空風力発電
ニュース&トピックス
NEWS & TOPICS
- 2026.07.11空の物流革命へ前進!赤坂剛史教授の大型VTOLドローン事業が「NINEJP奨励賞」を受賞
- 2026.05.01大型物流ドローンの事業化に向け国際スタートアップイベントでプレゼン
- 2026.03.16赤坂教授が成果発表と企業・投資家・支援機関とのネットワーキングを実施
- 2026.03.13開発中の「50kg積載・50km超 飛行可能なVTOL型有翼電動ドローン」飛行実験を実施
- 2025.12.26赤坂剛史教授の「TeSH DEMO DAY 2025」 で行った発表動画が公開
- 2025.12.02赤坂教授が豊富な起業経験を持つ経営人材(CxO)候補に事業説明
- 2025.11.07『Startup Magazine』にインタビュー記事が掲載されました
- 2025.10.23「Kawasaki Deep Tech Accelerator 2025」で赤坂教授が物流事業を提案
- 2025.10.20赤坂剛史教授が、次世代スタートアップ創出にむけVTOL型有翼電動ドローン事業について発表
- 2025.09.29「スタートアップ ビジネスプラン コンテストいしかわ2025」ファイナリスト7名に赤坂教授が選出
- 2025.09.24「物語の始まりへ」に永井健仁さんが紹介されました
- 2025.09.18赤坂剛史教授がイベント「北陸地域発グローバルスタートアップ創出に向けて」にパネラーとして登壇
- 2025.09.04赤坂剛史教授の開発・事業化に向けた取り組みが2件のスタートアップ関連事業に採択されました
- 2025.08.25日本最大級の産学連携イベント「大学見本市2025~イノベーション・ジャパン」に 赤坂教授が出展
- 2025.06.09「TeSH GAPファンドプログラム」にて「ステップ2」(事業化)で赤坂教授のドローン研究が採択
- 2025.03.1250kg超を積載した大型試作ドローンの飛行実験に成功
- 2024.12.13【動画あり】最大積載量50kgの大型試作ドローンの飛行実験を初めて実施
- 2024.12.10「物語の始まりへ」に圓山峻平さんが紹介されました
- 2024.12.05平野部から山間部への重量物の運搬や被災地支援活動での使用を想定し、試作ドローンの飛行実験を実施
- 2024.10.1110月16日(水)から19日(土)まで東京ビッグサイト西展示棟で「2024 国際航空宇宙展」に出展
- 2024.07.19大学・高専発スタートアップを創出するJSTの事業に「VTOL型有翼電動ドローンの事業」が採択
- 2024.05.27NEDO「長距離物資輸送用無人航空機技術の開発・実証」(経済安全保障重要技術育成プログラム)に参画
- 2023.12.05「物語の始まりへ」に大賀竜平さんが紹介されました
- 2023.08.03大学院の授業の一環でジェットエンジン固定翼ドローンの飛行試験を実施。三重県の木津フライングクラブで
- 2023.05.16「物語の始まりへ」に齊藤寛泰さんが紹介されました
- 2023.04.26赤坂准教授のインタビュー記事がセメダイン株式会社の「CEMEDINE Style」に掲載
- 2017.07.03「物語の始まりへ」に稲葉雅俊さんが紹介されました
研究紹介
RESEARCH
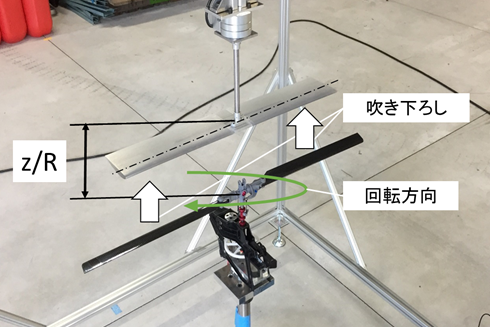
コンパウンド・ヘリコプタのロータと主翼の空力干渉を実験的に解明(胴体なし)
研究内容
シングルロータ機に固定翼機のような主翼を取り付けた高速飛行可能なコンパウンドヘリコプタの実現を目指して、ホバリング時に生じるロータの吹き下ろしと主翼との空力干渉について胴体なし模型でホバリング試験や風洞試験を行っています(JAXAと共同研究)。
ホバリング時にはメインロータの吹き下ろしが主翼に当たることで、メインロータの空力特性が変化したり、主翼には下向きに力が発生しますが、ロータと主翼の位置や主翼の形状によって変化しますので、それらの空力干渉のメカニズムの解明や、メインロータのロータ効率が高く、主翼に発生する下向きの力が小さい形態を検討しています。
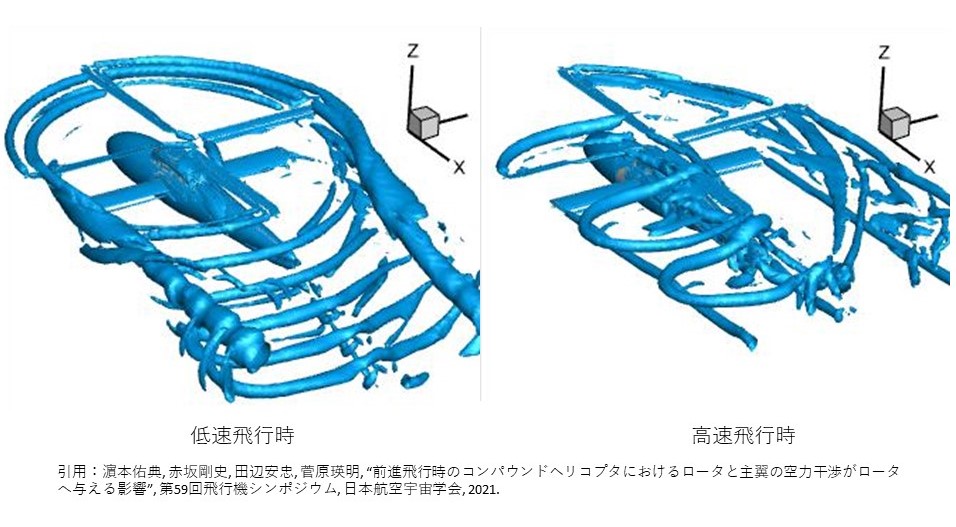
コンパウンド・ヘリコプタのロータと主翼の空力干渉を数値計算で解明
研究内容
シングルロータ機に固定翼機のような主翼を取り付けた高速飛行可能なコンパウンドヘリコプタの実現を目指して、前進飛行時に生じるロータの吹き下ろしと主翼との空力干渉について数値流体力学計算で研究しています。(JAXAと共同研究)。
前進飛行時にはメインロータの吹き下ろしや主翼まわりの流れが干渉します。ロータと主翼の位置や主翼の形状によって、メインロータや主翼の空力特性が変化するため、それらの空力干渉のメカニズムの解明や飛行効率が高い飛行方法などの研究しています。計算ソフトウェアは宇宙航空研究開発機構JAXAが開発した回転翼解析コードrFlow3Dを用いて、JAXA所有のスーパーコンピュータで計算しています。
コンパウンドヘリコプタの飛行試験研究

研究内容
シングルロータのラジコン模型機に主翼を搭載したコンパウンドヘリコプタ模型を設計製作して、ホバリング飛行試験や高速飛行試験を行い、操縦性や安定性などの飛行特性について研究を行っています。
コンパウンドヘリコプタは主翼があるためにメインロータと主翼に生じる空気力によって、シングルロータのヘリコプタに比べて操縦性や安定性が異なるため、それらの飛行特性について飛行試験によって解析しています。
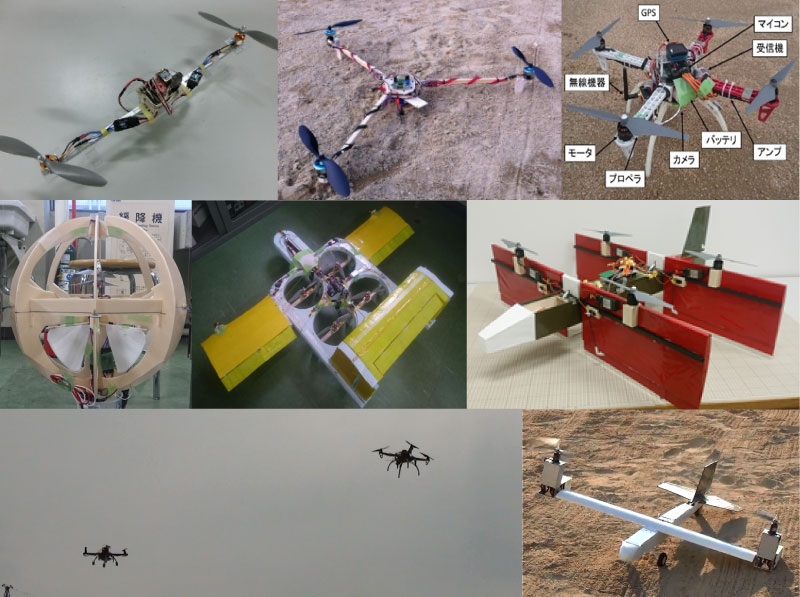
コンパウンドマルチプレーン(マルチロータプレーン)の飛行性に関する研究

研究内容
長距離飛行用ドローンや空飛ぶクルマである電動垂直離着陸機(eVTOL)などの形態に、複数のロータと搭載したマルチロータ(マルチコプタ)と固定翼飛行機が複合したコンパウンドマルチプレーンがあります。この機体は離着陸ではロータ(上向きのプロペラ)を回転させてマルチロータ機として飛行し、高度が確保できたら機体後方の推進用プロペラを回転させ固定翼機のように飛行します(上向きのプロペラは停止)。
マルチロータ機の飛行特性や固定翼機の飛行特性、さらにマルチロータから固定翼への遷移時の飛行特性、固定翼からマルチロータへの遷移時の飛行特性があり、それらについて操縦性や安定性について飛行試験や運動方程式を用いてコンピュータで飛行シミュレーションを行ったり、自律飛行ソフトウェアを作成して外乱に強く安定して飛行できる機体を研究しています。
ドローン(小型無人飛行機)の飛行特性や自律飛行に関する研究
研究内容
ドローン(小型無人飛行機)には固定翼・回転翼・マルチロータ機・ティルトロータ機・マルチロータ機などさまざまな形態がありますので、それぞれの形態の飛行特性や問題点を解析したり、悪天候下でも運用可能な小型無人飛行機の自律飛行に関する研究を行っています。
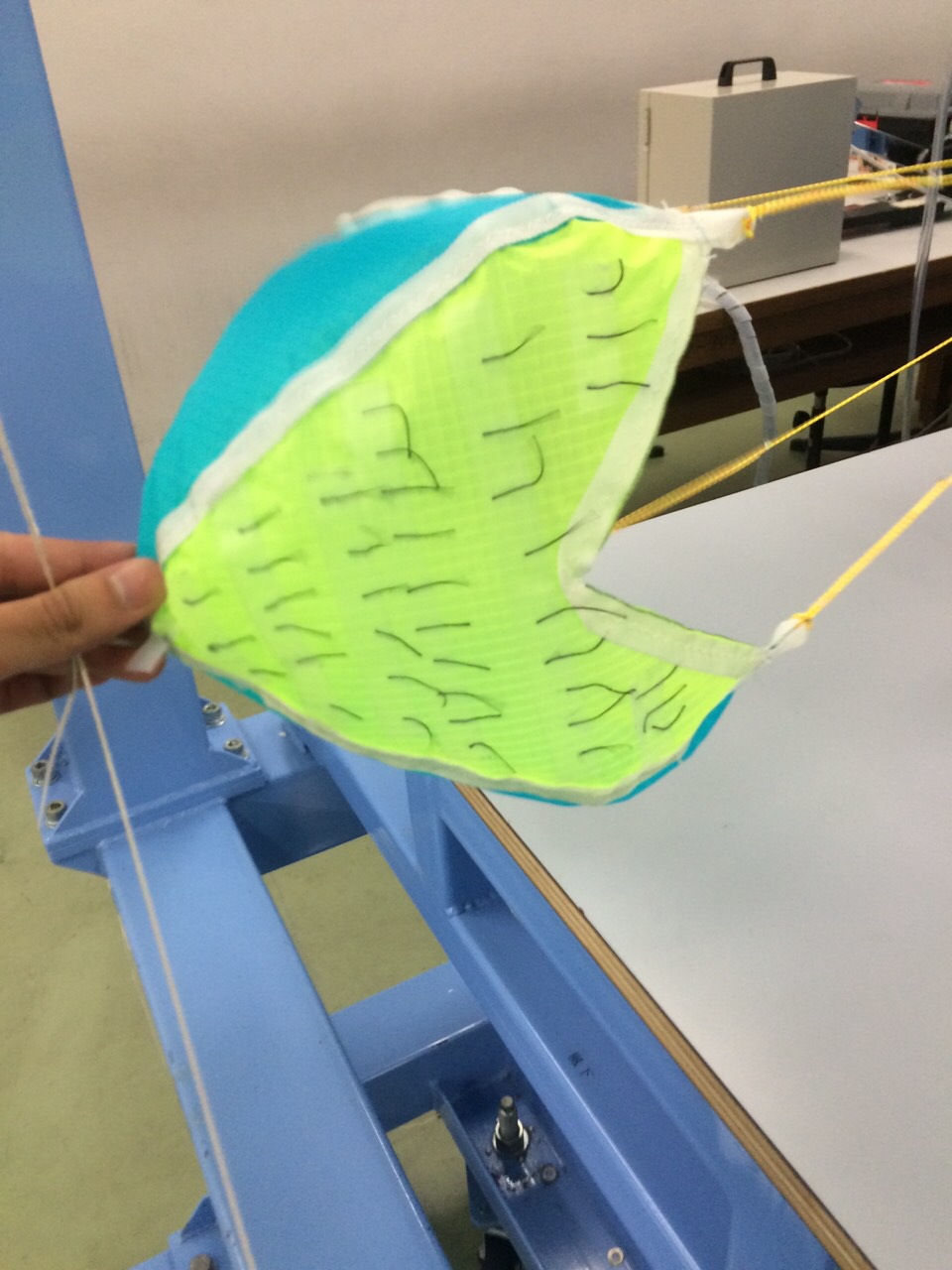
ドローンやロケット用パラシュートに関する研究
研究内容
ドローンがレベル4(有人地帯の目視外飛行)のステージになることでさまざまな分野で利用されるようになりますが、同時に墜落の危険性が高まります。その対策としてパラシュートを搭載して墜落時における対人・対物事故を減少させることが可能になります。
また宇宙ビジネスがさかんになってきていますが、宇宙からの帰還時にパラシュートを用いて減速・着陸することが検討されています。
そこで既存の丸型パラシュートとは異なり、ラインの本数が少なく減速効果が高い4ラインパラシュートについて風洞試験と落下試験にて、抗力が大きくなる形状や、パラシュートが開傘時に生じる衝撃荷重を低減する方法について研究しています。(ジオスポーツ社と共同研究)
コンパウンド・ヘリコプタのロータと主翼の空力干渉を実験的に解明(胴体あり)

研究内容
高速飛行可能なコンパウンドヘリコプタの実現を目指して、ホバリング時に生じるロータの吹き下ろしと主翼との空力干渉について胴体付き模型を用いてホバリング試験や風洞試験を行っています(JAXAと共同研究)。
空中風力発電における飛行体の飛行性に関する研究
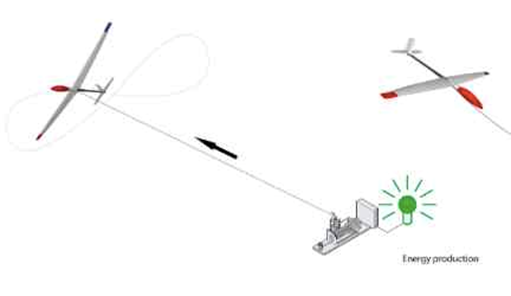
研究内容
持続可能な開発目標SDGsを目指し、風は高度が高くなるほど強くなることを利用して、通常の風力発電よりも高い高度での風力発電(空中風力発電)の研究をしています。
私たちは、凧揚げのようなテザー付き自律飛行機を用いた空中風力発電を検討しており、その飛行機の操縦性や安定性について研究しています。(図はイメージ)。(国内の大学や企業と連携して研究)
斜面や構造物近傍でのヘリコプタのホバリング性能
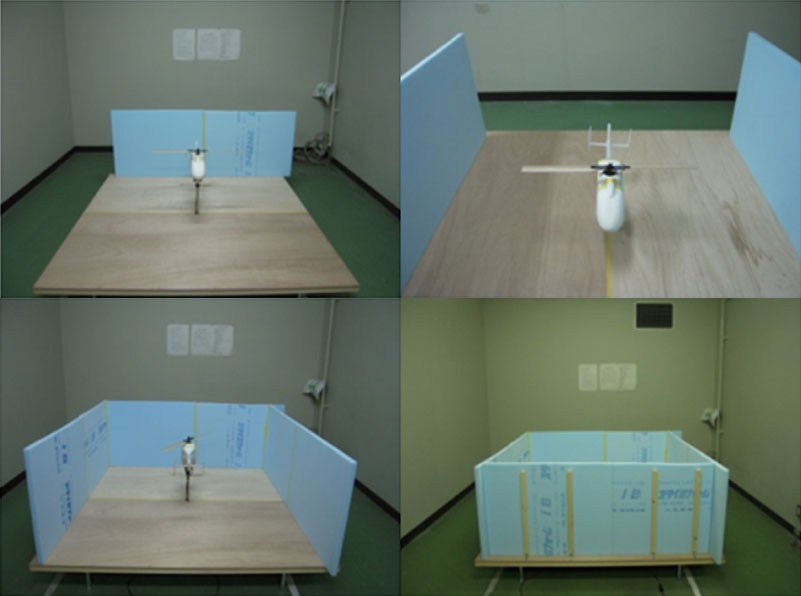
研究内容
ヘリコプタはホバリングできる特徴を生かして輸送・救急・救難など様々な場面で利用されています、ヘリコプタが使用される環境は通常のヘリポートと異なり、斜面や構造物近傍であることが多い。
そこで、障害物環境がヘリコプタのホバリング性能にどのような影響を及ぼしているか、風洞を用いたりしながら実験的に解明する研究を行っています。
ヘリコプタのロータ後流に関する研究
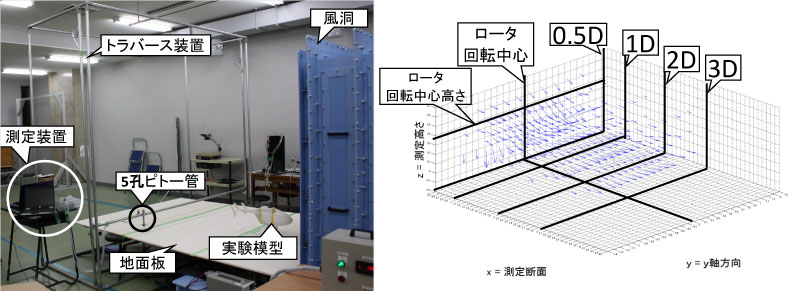
研究内容
ヘリコプタ・ロータ後方に風で流されたロータの吹き下ろしによってヘリコプタの後方を通過する航空機に悪影響を及ぼした事例があります。
そこで流されたロータの吹き下ろしのメカニズムを解明するため、風洞装置内にヘリコプタ・ロータを設置し、ロータ回転数やロータの設置高さ、胴体の影響などによるロータ後流を実験的に解明する研究を行っています。
教員紹介
TEACHERS

赤坂剛史 教授・博士(工学)
略歴
専門分野
専門:ドローン、コンパウンドヘリコプタ、回転翼航空機、パラシュート、空飛ぶクルマ、無人航空機、飛行制御、飛行力学、高空風力発電、パラグライダ、風洞試験、流体力学
担当科目
航空宇宙工学入門とキャリアデザイン 機械系製図Ⅰ プロジェクトデザインⅡ 工業概論 航空宇宙工学概論 航空制御工学 プロジェクトデザインⅢ(赤坂剛史研究室) 振動工学 航空システム専門実験・演習A モビリティ工学研究(赤坂剛史) ドローン設計特論(前学期春) 革新飛翔体特論(前学期夏)