情報理工学部 ロボティクス学科
藤木信彰 研究室
FUJIKI Nobuaki
LABORATORY
繊細な力の感覚を伝えられる遠隔操作によるロボットハンド

宇宙や海底など人間が直接作業できない環境では、遠隔操作によるロボットハンドが活躍する。しかし、その操作を映像だけで行う場合、物の硬さがわかりにくく、つかんだ物に力を入れすぎて壊してしまう可能性がある。そこで、繊細な力の感覚を伝えられる遠隔操作システムの研究開発を進めている。
キーワード
- 移動ロボット
- ロボットハンド
研究紹介
RESEARCH
力感覚を伝達する遠隔操作用マニピュレータの研究
研究内容
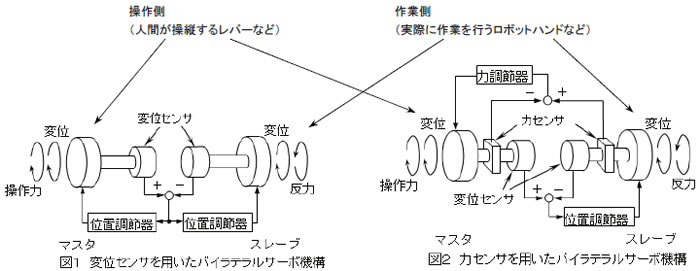
触れた力感覚を作業者に伝達しながら、遠隔操作を行う機構をバイラテラルサーボ機構という。図1、図2が代表的なバイラテラルサーボ機構である。この機構は、操作側(マスタ)の装置に操作力を加えて動かすと、作業をする側(スレーブ)の機構が指令を受けて操作側に追従する。そして、スレーブの機構が対象物に触れると、その感触(反力)がマスタに伝達される。この感触は、位置センサあるいは力センサからの情報によって力の大きさが決まり、マスタへ伝達されることになる。この制御法を用いることにより、実際に触れていなくても直接手に触れているような感覚で作業が行える。しかし、触れた感覚を正確に伝達しようとするとシステムが不安定になり、安定性を保とうとすると正確な力感覚の伝達ができない問題点がある。そこでシステムの安定性を保ちながら正確な力情報を伝達できる制御方法とその制御に用いるマニピュレータの研究を行っている。
バイラテラルサーボ機構に関する研究
教員紹介
TEACHERS

藤木信彰 准教授・博士(工学)
略歴
専門分野
専門:バイラテラルサーボ機構、マスタースレーブシステム、制御、ロボット
担当科目
ロボティクスキャリアデザイン 機械系製図Ⅰ 電気回路Ⅰ(再履修クラス) ロボット設計演習Ⅰ ロボット要素設計 ロボティクス数理・演習Ⅰ プロジェクトデザインⅢ(藤木信彰研究室) ロボティクス基礎(夏期集中講義) 機械系製図Ⅱ プログラミング基礎Ⅱ 電子回路 ロボティクス数理・演習Ⅱ ロボット設計演習Ⅱ 知的システム制御工学研究(藤木信彰) 制御工学特論
研究業績
RESEARCH RESULTS
論文
- パラレルリンク機構型工作機械の外力推定手法の検討
- Machining Performance of Robot-Type Machine Tool Consisted of Parallel and Serial Links Based on Calibration of Kinematics Parameters
- Forward Kinematics Model for Evaluation of Machining Performance of Robot Type Machine Tool
- MACHINING PERFORMANCE EVALUATION OF ROBOT TYPE MACHINE TOOL BASED ON FORWARD KINEMATICS MODEL
- Calibration Method of Parallel Mechanism Type Machine Tools
- Practical assistive device for sit-to-stand tasks
- Haptic Feedback Control for Robotic Surgical Forceps
- Control Method for Assistive Devices for Upper Limbs
詳しい研究業績はこちら