情報理工学部 ロボティクス学科
村尾俊幸 研究室
MURAO Toshiyuki
LABORATORY
複数台のドローンやビークルに対する位置姿勢制御手法の提案
世の中に今必要とされているロボットやシステムが、より安心を与えられるもの、効率的なものとなるように、その制御手法の提案に取り組んでいる。なかでも、環境モニタリングなどを目指した複数台のドローンや地上を移動するビークルに対する位置姿勢制御や視覚フィードバック制御および協調制御、またXRやタブレット端末などを通して人が介在するロボットシステムに対する半自律制御などを主な研究対象としている。
キーワード
- 位置姿勢制御
- ドローン・ビークル
- マルチエージェントシステム
- 視覚フィードバック制御
- サイバーフィジカルヒューマンシステム
ニュース&トピックス
NEWS & TOPICS
- 2025.06.25大学院の中西涼さんが第25回計測自動制御学会システムインテグレーション部門講演会にて優秀講演賞を受賞
- 2025.03.17大学院・石井諒さん(村尾研究室)が2024年度 計測自動制御学会北陸支部 優秀論文発表賞を受賞
- 2024.07.05「物語の始まりへ」に田島祐典さんが紹介されました
- 2024.02.28研究夢考房「ドローン・ビークルプロジェクト」の活動紹介
研究紹介
RESEARCH
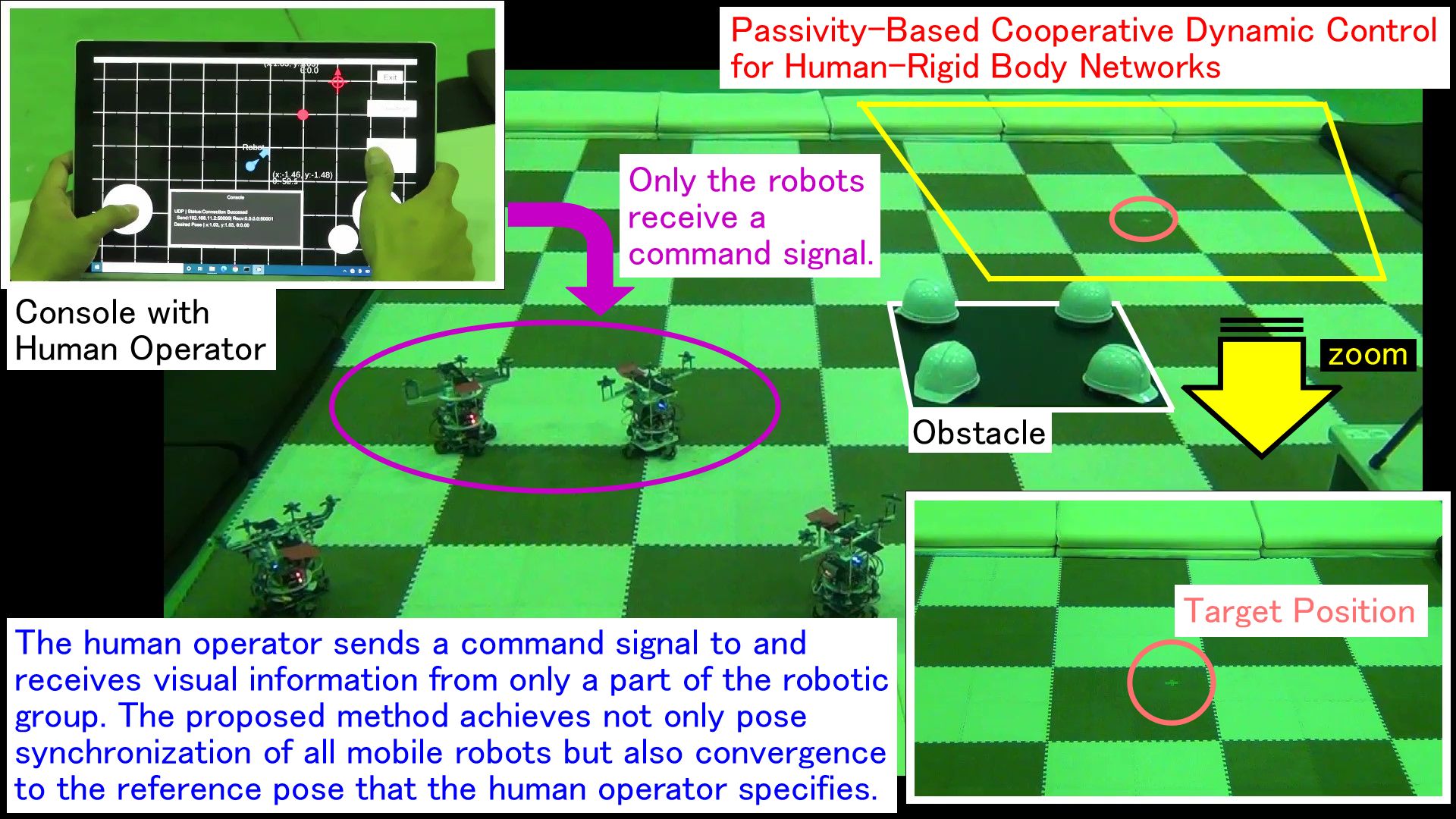
受動性に基づく人間-剛体ネットワークの動的協調制御
研究内容
ロボットのダイナミクスを考慮することで,位置に加え姿勢の制御も加味した人間-剛体ネットワークの動的協調制御を提案しています.人間オペレータは,ロボット群に対する目標位置姿勢を脳内で考え,そして,一部のロボットから得られる視覚情報に基づき,ロボット群を目標位置姿勢に一致させるような入力指令値を決定します.ただし,入力指令値は一部のロボットのみに与えられる設定としています.このような状況設定のもと,地上を走行する全方向移動ロボットを制御対象とし,位置姿勢に対して目標値に一致するような,ロボットへのダイナミクスに基づく制御入力を提案し,目標位置姿勢への収束性解析を行っています.(「研究室ホームページ」(一番下にリンクあり)内の「Topics (Movies)」に動画掲載)
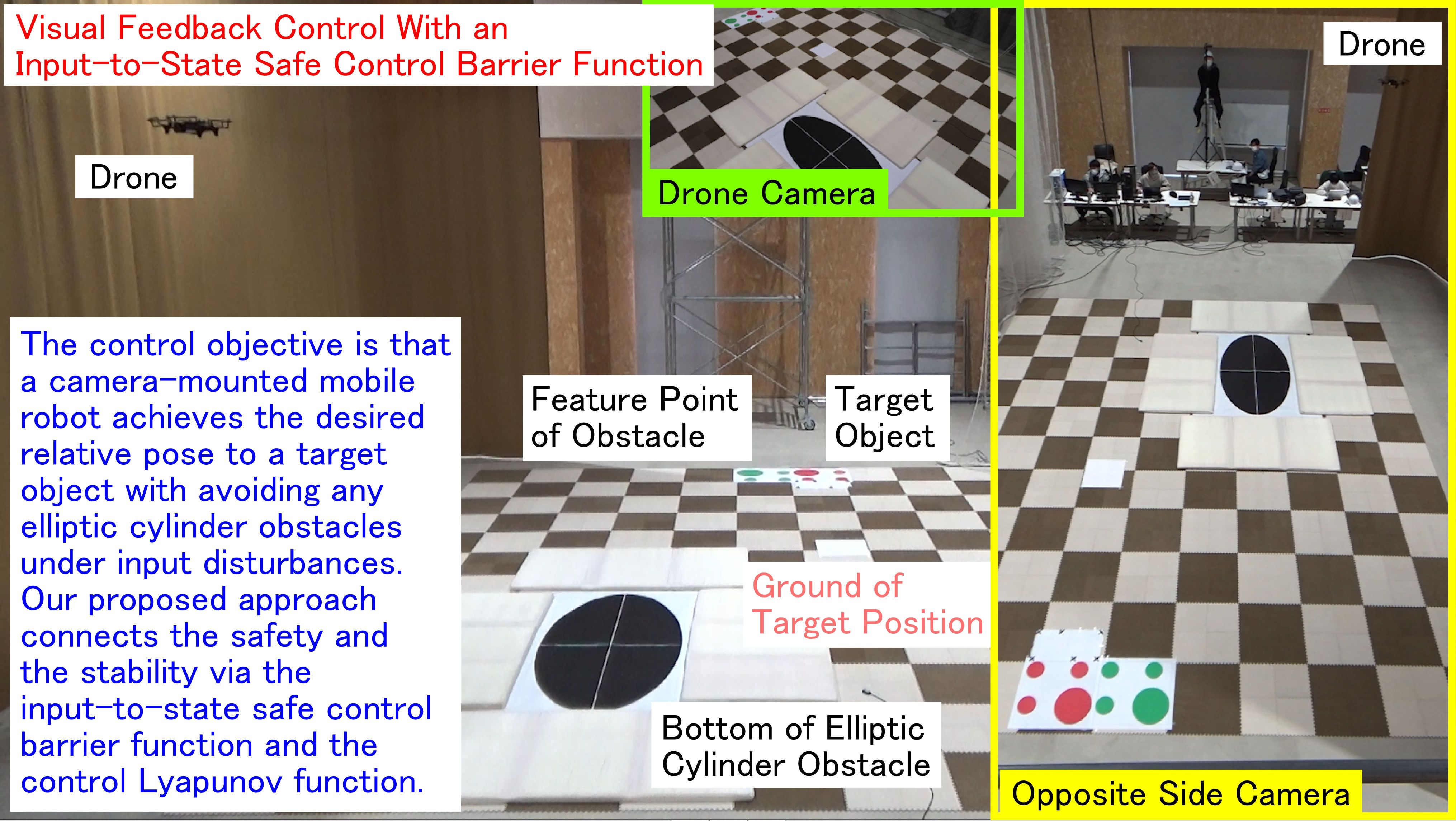
入力状態安全制御バリア関数を用いた視覚フィードバック制御
研究内容
ドローンに搭載されたカメラの視覚情報から推定する,目標となる対象物や障害物の相対位置姿勢に基づき,入力状態安全性を考慮した制御バリア関数を用いた位置姿勢制御手法を提案しています.この手法では,障害物を楕円柱で表し,その上空を回避させながら,ドローンからみた目標対象の相対位置姿勢に対して与えられる目標値へ,ドローンを収束させます.入力外乱が存在する状況を想定したうえで障害物を回避するという安全性を考慮した制御バリア関数と,動的視覚オブザーバによる推定問題を考えたうえで目標相対位置姿勢に収束するという安定性を考慮した制御リアプノフ関数から導出される拘束条件を用いた二次計画問題を定式化し,これを解くことでドローンの速度入力を求めています.(「研究室ホームページ」(一番下にリンクあり)内の「Topics (Movies)」に動画掲載)
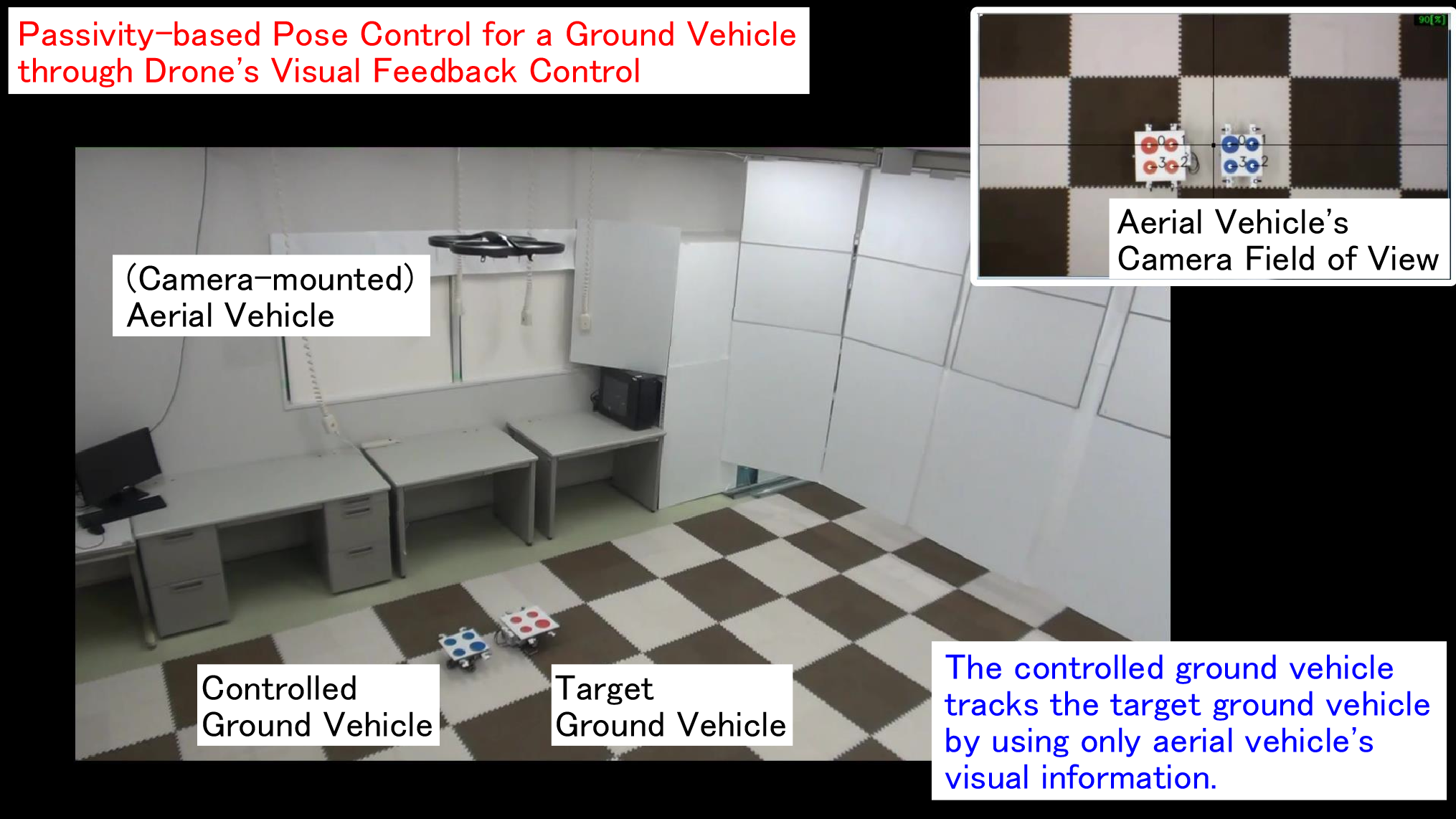
ドローンの視覚情報による地上ロボットの受動性に基づく位置姿勢制御
研究内容
地上を走行する移動ロボットの制御にドローンのカメラ情報を利用することで,地上ロボットとドローンを同時に制御する問題を考えています.具体的には,ドローンから得られる視覚情報を用いて,制御地上ロボットとドローンの両方が(勝手に動く)目標地上ロボットに追従する問題設定を考えています.動的視覚オブザーバによりドローンから制御ロボット並びにドローンから目標ロボットに対する相対位置姿勢を推定し,それらを用いた安定化制御手法を提案しております.(「研究室ホームページ」(一番下にリンクあり)内の「Topics (Movies)」に動画掲載)
入力状態安全性を考慮した制御バリア関数を用いた位置姿勢制御
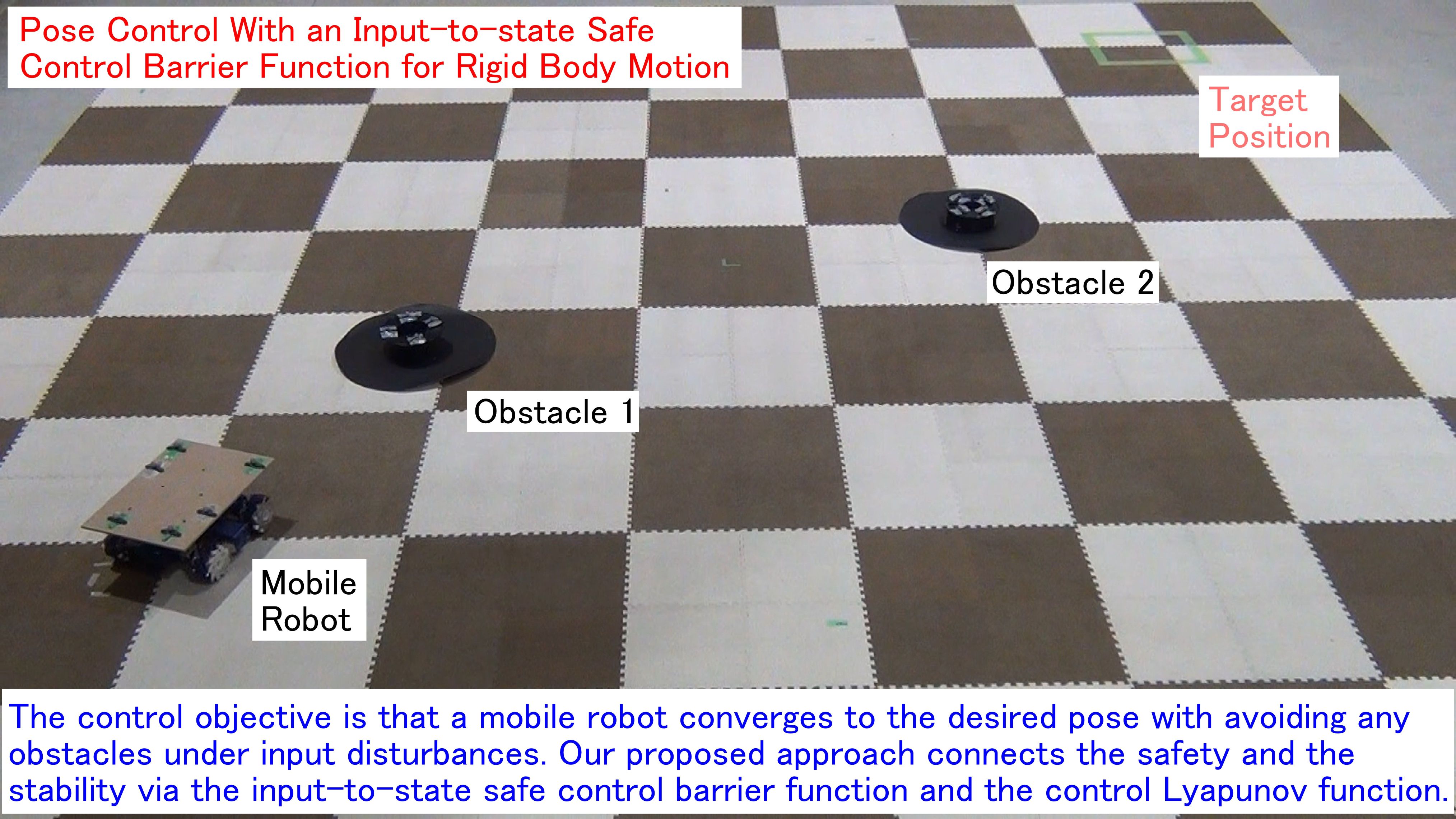
研究内容
制御バリア関数を用いたシステムの安全性を保証する制御手法が,制御理論に関する分野で近年大きな注目を浴びていますが,実環境では,モデル化されないダイナミクスや未知の入力外乱が,安全性を保証する際の不確かな要素となって現れてきます.この問題に対応するため,入力外乱が存在する状況を想定した,入力状態安全性を考慮した制御バリア関数を用いた位置姿勢制御手法を提案しています.入力状態安全性を考慮した制御バリア関数と制御リアプノフ関数を用いた二次計画問題を定式化することで,障害物を回避するという安全性と目標位置姿勢に収束するという安定性を同時に満たす位置姿勢制御手法となっています.(「研究室ホームページ」(一番下にリンクあり)内の「Topics (Movies)」に動画掲載)
LQG電力需給ネットワークに対する動的統合メカニズム
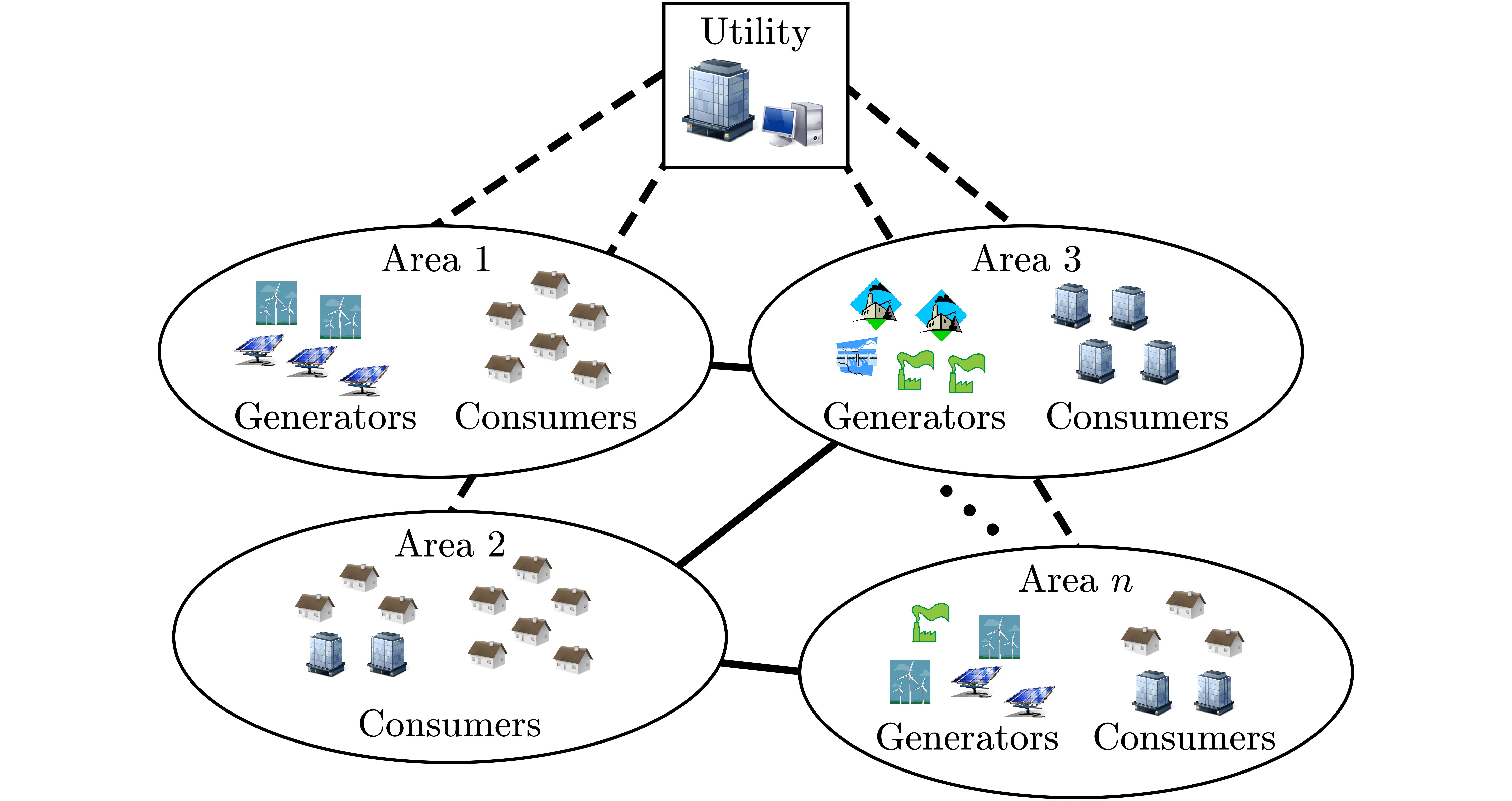
研究内容
エネルギー伝送ネットワークと双方向情報伝達ネットワークをインフラとした,需要者及び供給者,並びに公益事業体(ユーティリティー)が参加者となる次世代エネルギー需給システムにおいて,エネルギー需要者とエネルギー供給者が利己的かつ戦略的に決定する分散制御を束ねて公共の利益に導く最適な統合メカニズム(価格決定ルール)によるリアルタイムプライシング手法を設計しています.
一般的に,利得の最大化を目的としたプライシング手法では,ユーティリティーが行う価格決定の過程において,供給者や需要者の情報を必要とすることが少なくありません.このことは戦略的に虚偽の情報をユーティリティーに提供することで自己の利得を高めようとする誘因となりえます.このような戦略的な振る舞いを防ぐため,ゲーム理論や経済学の分野を中心に発展しているメカニズム理論のアプローチを制御理論に組み入れることで,我々はプライシング手法を提案しています.なお,メカニズムデザイン理論は各市場参加者にインセンティブを考慮させることで,真実の報告を行うことが自身にとって得策となることを保証する理論であり,合理的な考えを持つ市場参加者であれば,そのメカニズムの元では嘘の報告を自発的に避けるようになります.
教員紹介
TEACHERS

村尾俊幸 教授・博士(工学)
略歴
専門分野
専門:制御工学、ロボット制御、位置姿勢制御、視覚フィードバック制御、エネルギーマネジメント
学生へのメッセージ
日本の工学系では4年次から研究室活動が本格化する大学が多いですが、私は4年次まで研究というものに興味を持っていない学生でした。研究室選びも、研究内容というよりも、選んだ研究室の先生の授業内容や授業のやり方が一番分かりやすく、先生の雰囲気も含め自分に合っていたから選びました。そんなですから、大学院に進学しましたが、初めから意識高くぜひ進学して良い研究をしようなんて思っているわけもなく、大学院は行くべきなのですかと、研究室選び直前に複数の先生に尋ねにいったくらいです。そのような私でも、良い先生、先輩、同期、後輩と出会うことで、充実した大学生活、研究室生活を経験できました。仲間と一緒に研究をするって楽しいですよ。たとえ大学入学時にやりたいことが明確に決まっていなくても、大学生活を送りつつ、やりたいことや素敵な仲間を見つけてみませんか。そんなあなたと、教室や研究室で会えることを楽しみにしています。
担当科目
ロボティクスキャリアデザイン ロボティクス入門 プロジェクトデザイン入門(実験)(ロボティクス学科) シミュレーション工学 ロボティクス専門実験・演習A プロジェクトデザインⅢ(村尾俊幸研究室) 電気回路Ⅰ 制御工学Ⅰ イノベーション基礎 知的システム制御工学研究(村尾俊幸) 位置姿勢制御特論(後学期秋) マルチエージェントシステム特論(後学期冬)
研究業績
RESEARCH RESULTS
論文
- Development of FES Upper and Lower Limbs Interlocking Motion Control System to Induce Periodic Rhythm
- 入力状態安全制御バリア関数を用いた視覚フィードバック制御
- FES-Assisted Standing-up Motion Control Incorporating Center of Mass Motion
- Pose Synchronization for Semi-Autonomous Dynamic Robotic Swarms with a Passivity-Short Human Operator
- Tracking Control for FES Alternate Knee Bending and Stretching Trike With Electric Motor Assistance
- ロボティクス学科におけるデジタル教育取り組み事例
- 繰り返し学習制御と機能的電気刺激によるペダリング運動
- 入力状態安全性を考慮した制御バリア関数を用いた位置姿勢制御
詳しい研究業績はこちら