









ロボット技術の研究開発でめざす
“人間”の生活支援ロボット技術の研究開発でめざす
“人間”の生活支援
“人間”の生活支援ロボット技術の研究開発でめざす
“人間”の生活支援
2025.1.20
2018年春に開設された金沢工業大学白山麓キャンパスにある「KITイノベーションハブ」は、AI、IoT、ビッグデータ、ロボット技術、エネルギーマネジメントといった先端技術を駆使して地方創生を進める金沢工業大学地方創生研究所の実証実験の活動拠点だ。ここに2019年10月に設置された研究用の「いちご圃場」では、高品質ないちごの生産に向けたいくつかの実証実験が産学連携で行われている。そのひとつの取り組みとして注目されているのが、北菱電興株式会社(金沢市)との共同研究からスタートした「農業ICTプロジェクト」だ。このプロジェクトではいちごの品質や収穫量の安定化だけでなく、作業の負担軽減につながる技術開発によって農業の新たな担い手の確保も支援するという。ビニールハウス内の環境をモニタリングするセンサー、クロスリアリティ(XR)と双腕マニピュレータを用いた作業支援システムなど、次世代型の営農システムとして実用化が期待されるその研究内容について、ロボティクス学科の竹井義法教授に話を聞いた。

金沢工業大学
ロボティクス学科 教授
竹井 義法 (たけい よしのり) 博士(工学)
福岡大学工学部電気工学科卒。福岡大学大学院工学研究科電気工学専攻博士課程前期修了。九州大学大学院システム情報科学研究科電気電子システム工学専攻博士後期課程単位取得退学後、九州大学大学院システム情報科学研究院助手を経て、2002年金沢工業大学特別研究員。講師、准教授を経て、2015年より教授。専門は化学センサシステム、システム同定、ガス源探索ロボット、筋電義手、生活支援ロボット。
ロボティクス学科 教授
竹井 義法 (たけい よしのり) 博士(工学)
竹井 義法
(たけい よしのり) 博士(工学)
金沢工業大学
ロボティクス学科 教授
(たけい よしのり) 博士(工学)
金沢工業大学
ロボティクス学科 教授
福岡大学工学部電気工学科卒。福岡大学大学院工学研究科電気工学専攻博士課程前期修了。九州大学大学院システム情報科学研究科電気電子システム工学専攻博士後期課程単位取得退学後、九州大学大学院システム情報科学研究院助手を経て、2002年金沢工業大学特別研究員。講師、准教授を経て、2015年より教授。専門は化学センサシステム、システム同定、ガス源探索ロボット、筋電義手、生活支援ロボット。
地元企業との連携をきっかけに
農業支援の共同研究を開始
農業支援の共同研究を開始
農家の高齢化と後継者不足というわが国の農業が直面する課題を解決する手段として、大きな期待を集めているのがICT(情報通信技術)、ロボット技術、AI、IoTなどの先端技術を活用した“スマート農業”の導入だ。金沢工業大学では2015年に「農業支援機器開発プロジェクト」が、文部科学省の平成25年度「地(知)の拠点整備事業」の一つとして採択された。主にロボティクス学科の学生が中心となって農業支援をテーマにしたロボットなどの開発に取り組み、産学連携によるスマート農業の実現を目標に活動を続けてきた。
「本学と連携協定を結んでいる北菱電興さんとのお付き合いをきっかけに、ロボティクス学科としても“農業支援”をひとつのテーマにしようということになり、同社が運営する七尾市中島町の太陽光発電を使ったいちご圃場で、環境センシングの共同研究を開始しました。これは小さなセンサーを使ってビニールハウス内の局所的な温湿度のバラつきを測定し、ハウス全体の温湿度分布を調べることでいちごの生育環境を最適化するのが目的です」
「本学と連携協定を結んでいる北菱電興さんとのお付き合いをきっかけに、ロボティクス学科としても“農業支援”をひとつのテーマにしようということになり、同社が運営する七尾市中島町の太陽光発電を使ったいちご圃場で、環境センシングの共同研究を開始しました。これは小さなセンサーを使ってビニールハウス内の局所的な温湿度のバラつきを測定し、ハウス全体の温湿度分布を調べることでいちごの生育環境を最適化するのが目的です」

その後、北菱電興が2017年12月に白山市上野町(旧鳥越村)にマイクロ水力発電を使った新たないちご圃場を開設したため、研究フィールドもここに移設。同社と共同開発した安価なセンサーを使って、圃場内の温度、湿度、照度、CO2濃度、土壌水分量などを測定して、遮光カーテンの開閉や空調制御の自動化などを実現している。
「2018年に開設した白山麓キャンパスに地方創生研究所ができて、農業ICTプロジェクトが立ち上がったタイミングで、いちごのハウス栽培を題材に農業技術の自動化に取り組もうということになりました。キャンパス内には研究用のビニールハウスもつくられたので、現在、私の研究室ではセンシングデータをいちごの圃場管理に活用する研究や、成長不良のいちごの摘果(間引き)を自動化するための研究を行っています」
「2018年に開設した白山麓キャンパスに地方創生研究所ができて、農業ICTプロジェクトが立ち上がったタイミングで、いちごのハウス栽培を題材に農業技術の自動化に取り組もうということになりました。キャンパス内には研究用のビニールハウスもつくられたので、現在、私の研究室ではセンシングデータをいちごの圃場管理に活用する研究や、成長不良のいちごの摘果(間引き)を自動化するための研究を行っています」

白山麓キャンパス内にある研究用ビニールハウス
受粉不良による成長不良でいびつな形となったいちごは、それを間引くことで正常な果実の成長を促すため、摘果はいちご栽培に欠かせない作業だ。しかし、摘果がいちごの収穫時期と重なるため、人的リソースの確保は農家にとって大きな問題だった。そこで、どのいちごを間引けばいいのかを適切に判断し、摘果を自動で行うロボットをつくろうというのが、このプロジェクトのひとつの目標でもある。もちろん、その実現のためにはいくつものハードルがあり、それを克服するためには様々な分野における技術開発が必要となってくる。
「第1段階として取り組んでいるのが、摘果の技術を持った熟練者がビニールハウス内の圃場で作業する非熟練者に、別の場所から遠隔で摘果の作業支援を行うためのシステムづくりです。これはMR(Mixed Reality=複合現実)やVR(Virtual Reality=仮想現実)といったいわゆるXR(クロスリアリティ)技術を使って、仮想空間と現実世界をつないで遠隔地を結ぶ作業支援のシステムになります。
「第1段階として取り組んでいるのが、摘果の技術を持った熟練者がビニールハウス内の圃場で作業する非熟練者に、別の場所から遠隔で摘果の作業支援を行うためのシステムづくりです。これはMR(Mixed Reality=複合現実)やVR(Virtual Reality=仮想現実)といったいわゆるXR(クロスリアリティ)技術を使って、仮想空間と現実世界をつないで遠隔地を結ぶ作業支援のシステムになります。



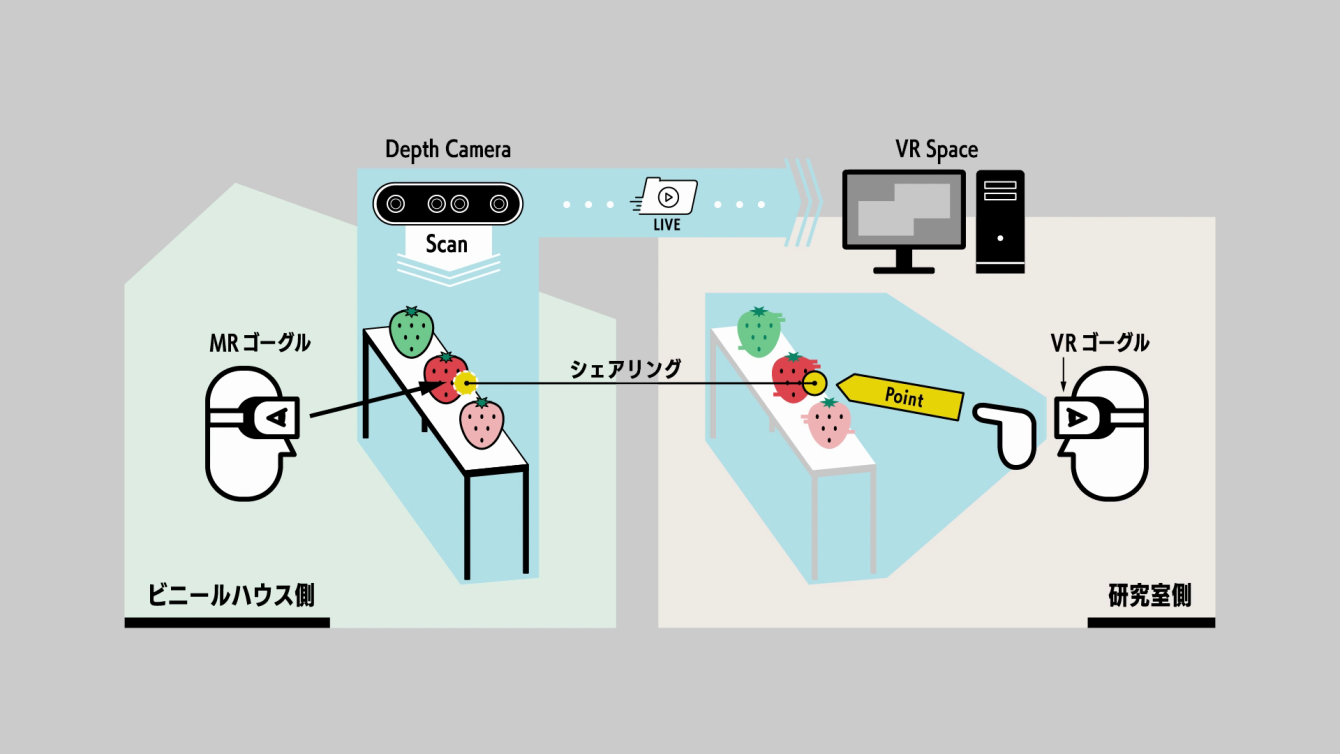
ローカル(ビニールハウス)と遠隔地(研究室)を結んでの作業支援の実験の様子。ローカルにいる作業者のMRゴーグルには、遠隔地で打ったピンが表示される。ローカル側のカメラの映像は遠隔地にいる作業者のVRゴーグルに表示・共有され、双方で連携しながら作業を進められるようになっている。
4枚目は作業支援システム(空間位置情報共有)の概略図
4枚目は作業支援システム(空間位置情報共有)の概略図
遠隔地にいる熟練者は、ビニールハウスのいちごの様子を映したカメラの映像をVRゴーグルで見ることで情報共有し、どのいちごを摘めばいいのか指示を出します。現場にいる非熟練者のMRゴーグルの仮想空間に、摘むべきいちごがどれなのかという指示がピンで具体的に表示されるので、それに従って効率よくいちごを摘むことができるわけです」
XR技術の活用範囲を
農業以外の分野にも拡大
農業以外の分野にも拡大
高齢化の進行で農業従事者だけでなく熟練者がどんどん減っている状況下では、経験の少ない非熟練者が簡単に作業をこなせるような仕組みを構築していかなければ、日本の農業がますます縮んでいくのは間違いない。こうしたXR技術を活用して離れた場所で同じ空間の情報をカメラとゴーグルで共有することが可能になれば、いちご栽培に限らず様々な分野で作業支援や技術指導がスムーズに行えるようになると、竹井教授は話す。
「単にカメラの映像を共有するだけならタブレットやスマホでも可能ですが、離れた場所の空間情報を直感的に把握し共有するためには、XR技術を使ったMRゴーグルやVRゴーグルがとても有効です。ただ、ビニールハウス内で撮影した画像には自然光の入り具合や天候によって明暗がつきやすいので、そのコントラストを補正して画像の元の色に近づけて再現する必要があります。
「単にカメラの映像を共有するだけならタブレットやスマホでも可能ですが、離れた場所の空間情報を直感的に把握し共有するためには、XR技術を使ったMRゴーグルやVRゴーグルがとても有効です。ただ、ビニールハウス内で撮影した画像には自然光の入り具合や天候によって明暗がつきやすいので、そのコントラストを補正して画像の元の色に近づけて再現する必要があります。

そこで私たちが開発したのが、確率共鳴現象を応用してカラー画像のコントラストを復元する技術です。これはノイズに埋もれている微弱な信号を検出するために、さらにノイズを乗せて非線形なフィルターに通すというもので、これを繰り返すとバランスよく明るさを復元することができます。この技術は特許申請もしていて、実用化されれば監視カメラや車載カメラなどの画質改善にも役立つと考えています」
確かに設置したカメラの向きを遠隔操作によって変えることはできても、カメラの位置そのものを移動させるのは難しい。しかし、この技術を使って画像の暗部を明るく再現できれば対象物を精細に確認できるので、精度の高い状況把握によって的確な指示出しが可能になるのは間違いない。
確かに設置したカメラの向きを遠隔操作によって変えることはできても、カメラの位置そのものを移動させるのは難しい。しかし、この技術を使って画像の暗部を明るく再現できれば対象物を精細に確認できるので、精度の高い状況把握によって的確な指示出しが可能になるのは間違いない。


ビニールハウスのいちごの写真。上が確率共鳴現象の技術使用前、下が使用後
「現状の作業支援の実験では、熟練者が現場に行かずにリモートで指示を出せる状況を実現しましたが、現場と研究室それぞれでリアルタイムに作業を同期させているという意味では、両者に同じ時間が必要になります。私たちがめざす“非同期”の作業支援では、まず熟練者の技術を記録したデータを蓄積してビッグデータ化し、そのデータを使って熟練者に代わってAIに指示を出させます。
さらにその先の段階では、摘果や収穫の作業をロボットによって自動化します。そのためには現場と指示を出す側の両方で自動化を進めていく必要があるので、研究室では自動化に向けたロボットをつくる第一歩として、2本の腕で作業を行える双腕マニピュレータと呼ばれるロボットアームの開発に取り組んでいます」
さらにその先の段階では、摘果や収穫の作業をロボットによって自動化します。そのためには現場と指示を出す側の両方で自動化を進めていく必要があるので、研究室では自動化に向けたロボットをつくる第一歩として、2本の腕で作業を行える双腕マニピュレータと呼ばれるロボットアームの開発に取り組んでいます」

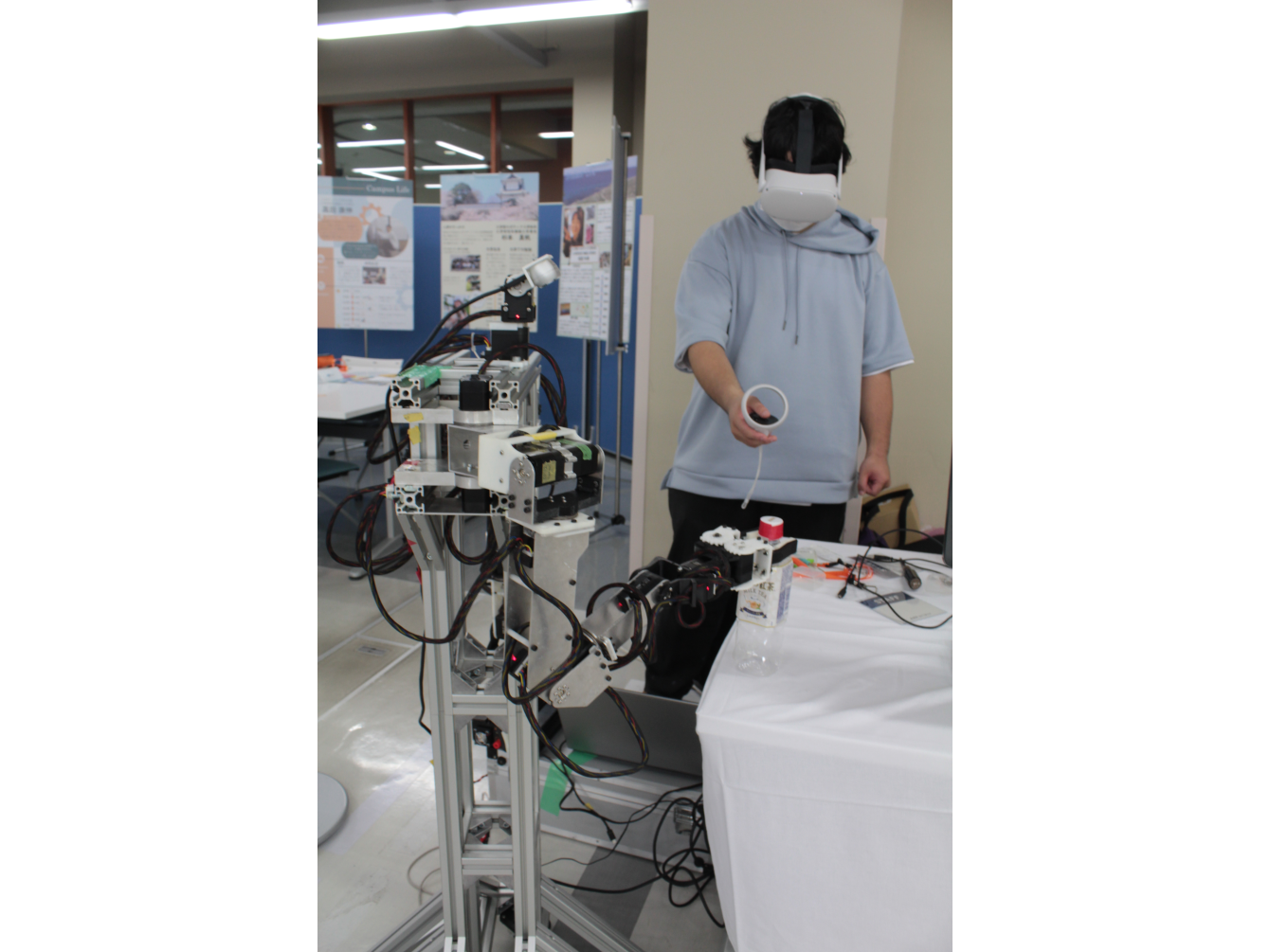
双腕マニピュレータを使って、遠隔操作により右手でペットボトルをつかむ実験中
竹井教授は以前から障害者の生活支援のために、上半身だけのヒューマノイドを使った双腕マニピュレータの開発をテーマにしていたのだが、いちごの摘果を行う際に葉っぱをよけたり茎をつかんだりするには両腕を使って作業する必要があるため、まさにこの技術が応用できると考えたわけだ。
「基本的に別々のテーマの研究だとしても、技術的には補完し合うテーマだったりすることは少なくありません。ある技術を使うとき、それを完全に完成させてから使うという考え方がありますが、私はそうは考えていません。たとえ段階的でもかまわないので、その技術を実際に現場で活用できないかということを考えていつも研究開発を行うようにしています。
研究開発において技術、コスト、職人技の継承といった要素を融合させるためには、まずその意味を理解することが何よりも大切なのは言うまでもありません。たとえば現状ではコストが見合わなかったり技術的に難しかったりしたとしても、いつかそれらが融合する日を見据えて始めなければ、いつまでたっても何も生まれません。そのためにも産学連携で企業にも協力していただきながらプロジェクトを進めていくことが、これからはますます重要になっていくと思います」
「基本的に別々のテーマの研究だとしても、技術的には補完し合うテーマだったりすることは少なくありません。ある技術を使うとき、それを完全に完成させてから使うという考え方がありますが、私はそうは考えていません。たとえ段階的でもかまわないので、その技術を実際に現場で活用できないかということを考えていつも研究開発を行うようにしています。
研究開発において技術、コスト、職人技の継承といった要素を融合させるためには、まずその意味を理解することが何よりも大切なのは言うまでもありません。たとえば現状ではコストが見合わなかったり技術的に難しかったりしたとしても、いつかそれらが融合する日を見据えて始めなければ、いつまでたっても何も生まれません。そのためにも産学連携で企業にも協力していただきながらプロジェクトを進めていくことが、これからはますます重要になっていくと思います」
機械嗅覚を研究・開発し
ガス漏れ探査への活用をめざす
ガス漏れ探査への活用をめざす
現在、竹井研究室では信号処理、ケミカルセンサー、二足歩行ロボット、障害者支援、ヒューマノイドなど、実に幅広い研究領域に取り組んでいるが、竹井教授は基本的に“人間”を対象とするテーマを中心に研究を行っているという。
「人間を模擬したロボットをつくったり、人間を計測して筋電義手をつくってアシストしたりすることだけが、人間を対象としたテーマではありません。いちご圃場における環境計測などの様々な支援機器の開発も、(人間の関わる空間での問題を取り扱うという意味で)人間を対象とした研究テーマのひとつだと考えています」
そんな竹井教授が人間の“暮らし”を支援するテーマとして以前から取り組んでいるのが、匂いセンサーを使った機械嗅覚の研究だ。
「五感を駆使する人間と違い、いまのところロボットが感じ取るのは視覚、触覚、聴覚の三感が主で、味覚と嗅覚は応用が少ないのです。そこで人間の嗅覚に相当する匂いセンサーを使ったロボットの開発を、研究テーマとして選びました。具体的にはこの技術をガス漏れ探査ロボットや、火災の発生源の早期発見ロボットに活用したいと考えています」
使用する半導体式のガスセンサーは、ガスに曝露されると半導体の抵抗(電気伝導度)が変化するため、その濃度変化を読み取ることでロボットの嗅覚をつくることができるという。実験では実際にガスを使うわけにはいかないので、揮発させたエタノールの匂いをファンで流し、その匂いを本体の左右にガスセンサーを取り付けた独立2輪駆動の台車に探知させて、ガス源を見つけ出していく。台車には真ん中に間仕切り板を設けてあるので、流れてくる匂いを左右どちらかのセンサーがより強く応答するという仕組みだ。
そんな竹井教授が人間の“暮らし”を支援するテーマとして以前から取り組んでいるのが、匂いセンサーを使った機械嗅覚の研究だ。
「五感を駆使する人間と違い、いまのところロボットが感じ取るのは視覚、触覚、聴覚の三感が主で、味覚と嗅覚は応用が少ないのです。そこで人間の嗅覚に相当する匂いセンサーを使ったロボットの開発を、研究テーマとして選びました。具体的にはこの技術をガス漏れ探査ロボットや、火災の発生源の早期発見ロボットに活用したいと考えています」
使用する半導体式のガスセンサーは、ガスに曝露されると半導体の抵抗(電気伝導度)が変化するため、その濃度変化を読み取ることでロボットの嗅覚をつくることができるという。実験では実際にガスを使うわけにはいかないので、揮発させたエタノールの匂いをファンで流し、その匂いを本体の左右にガスセンサーを取り付けた独立2輪駆動の台車に探知させて、ガス源を見つけ出していく。台車には真ん中に間仕切り板を設けてあるので、流れてくる匂いを左右どちらかのセンサーがより強く応答するという仕組みだ。
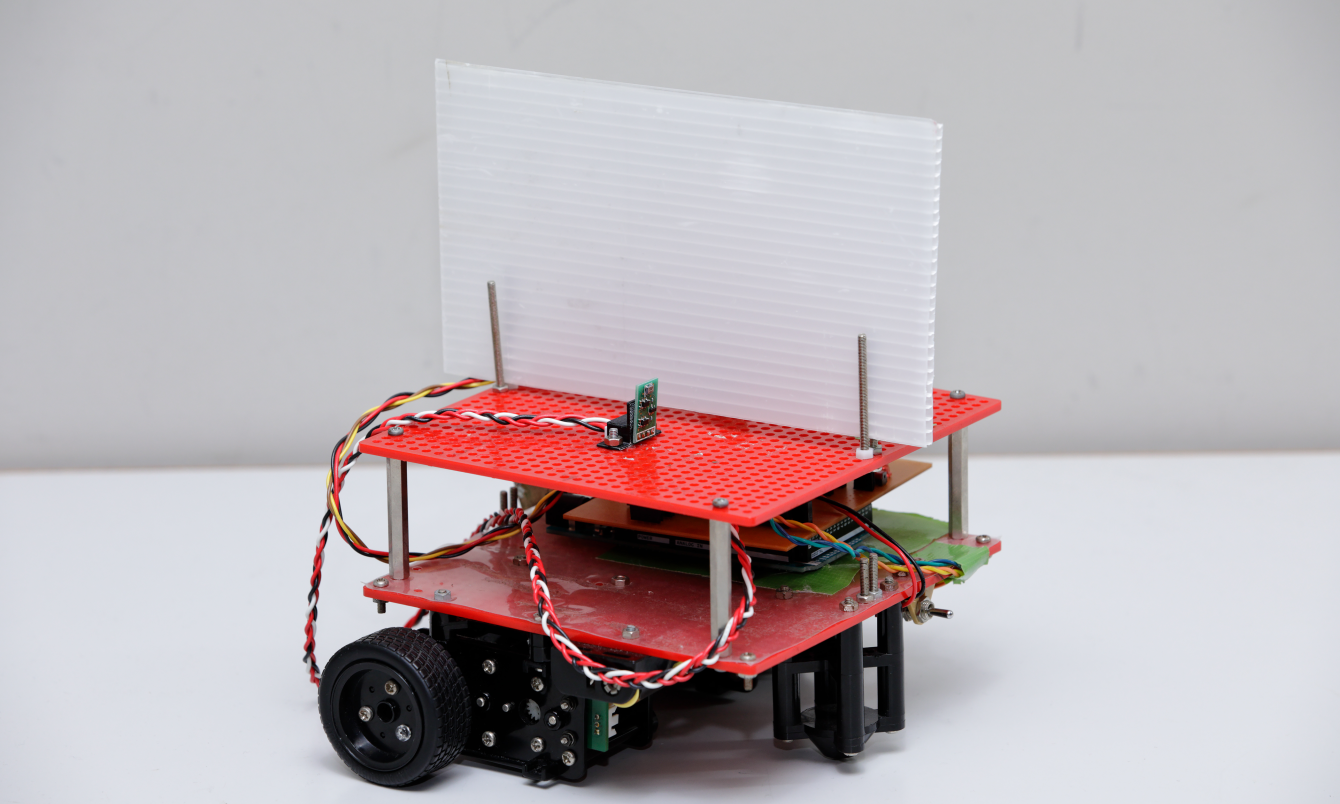
竹井研究室が開発中の匂い源探索ロボット。上の白い間仕切り板の向こう側にもセンサーが配置されている
「独立2輪駆動の台車には、左右一対のアクチュエータ(タイヤを駆動するモーター)が付いていて、匂いを右側のセンサーが探知すると左側のアクチュエーターが活性化するため、台車は右方向に進んでいくことになります。一見すると台車が考えながら動いているように見えますが、意志決定しながら動いているわけではなく単に匂いに反応しているだけです。
固定式のガス漏れ警報器を各部屋に設置すればいいと思うかもしれませんが、ロボットにセンサーを付ければロボットが動いて回ることができるので、少ないセンサーで広い範囲をカバーできます。さらにロボットを使えばもともと警報器が設置されていないような場所を、局所的にセンシングできるというメリットもあります」
研究室では地上を2次元(2D)的に探索するロボットだけでなく、ドローンを使って上空から3次元(3D)的に探索する研究も行っているそうだが、これは2次元のそれと比較して非常に難易度が高いという。
固定式のガス漏れ警報器を各部屋に設置すればいいと思うかもしれませんが、ロボットにセンサーを付ければロボットが動いて回ることができるので、少ないセンサーで広い範囲をカバーできます。さらにロボットを使えばもともと警報器が設置されていないような場所を、局所的にセンシングできるというメリットもあります」
研究室では地上を2次元(2D)的に探索するロボットだけでなく、ドローンを使って上空から3次元(3D)的に探索する研究も行っているそうだが、これは2次元のそれと比較して非常に難易度が高いという。

「ドローンのブレードが回転することで上から下へのエアフローをつくって周辺の匂いをかき乱してしまうので、センサーの取り付け位置が難しいのです。海外の研究だとドローンから延ばした長いロッドの先端にセンサーを付けている事例などもありますが、私たちはブレードを回す4カ所のローターの真下にセンサーを取り付けて、4カ所それぞれが拾うガス濃度の強弱でどの方向なのかを特定しています。実験では高さ方向と水平方向で濃度をどう探知しているのかというデータを取り、それぞれ指向性を持てることが確認できています。
私たちが開発を続けているロボットは、嗅覚のみを用いたガス源探索の実験を行っています。しかし、本来は匂い源を見つけ出すには匂いの情報だけでなく、視覚的な情報などを統合する必要があるので、将来的にはセンシング技術の幅をさらに広げていきたいと思います」
あくまでも“人間”を対象として、その生活を多方面から支援していくためにロボット技術の研究開発に取り組む竹井教授。本人は「広げすぎかもしれませんが」と笑うが、その研究領域はこれからも広がり続けることだろう。
私たちが開発を続けているロボットは、嗅覚のみを用いたガス源探索の実験を行っています。しかし、本来は匂い源を見つけ出すには匂いの情報だけでなく、視覚的な情報などを統合する必要があるので、将来的にはセンシング技術の幅をさらに広げていきたいと思います」
あくまでも“人間”を対象として、その生活を多方面から支援していくためにロボット技術の研究開発に取り組む竹井教授。本人は「広げすぎかもしれませんが」と笑うが、その研究領域はこれからも広がり続けることだろう。

前の記事
次の記事