情報理工学部 ロボティクス学科
竹井義法 研究室
TAKEI Yoshinori
LABORATORY
人間・環境センシングの実現とロボット技術を活用した支援システムの開発を目指して
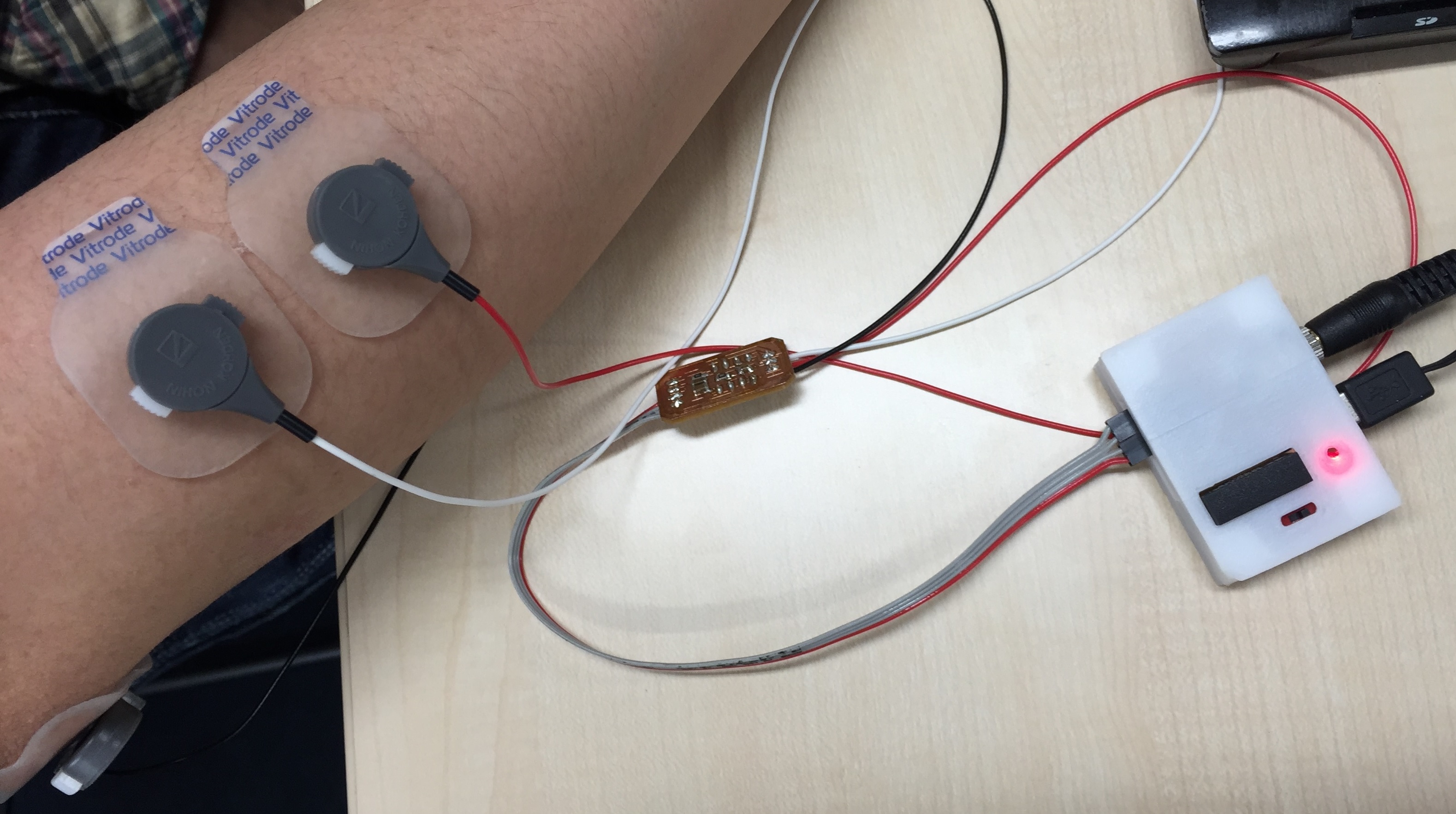
人間や環境をセンシングする技術とヒトを支援するロボットの開発を目指して研究を行っている。アシスト機器や人間の動作計測に応用可能な筋電位計測システムの開発と筋電義手への応用、農業支援を目的としたIoTを活用したセンサネットワークや作業負担を軽減するロボットの開発等を行っている。また、ドローンや二足歩行ロボットといった移動体の研究や,嗅覚を持つロボットであるガス源探索ロボットの開発等に取り組んでいる。
キーワード
- 筋電義手
- 農業支援ロボット
- 生活支援ロボット
- 二足歩行ロボット
- ガス源探索ロボット
ニュース&トピックス
NEWS & TOPICS
- 2025.11.11垣内皐良さんが第25回計測自動制御学会システムインテグレーション部門講演会で優秀講演賞を受賞
- 2025.01.20竹井義法教授へのインタビューをBackUpに掲載
- 2024.02.06「物語の始まりへ」に森星太さんが紹介されました
- 2023.04.05白山麓キャンパスで行われている竹井義法研究室「農業ICTプロジェクト」の動画を公開
- 2022.03.02西村裕太さんが「第22回計測自動制御学会 システムインテグレーション部門講演会」で優秀講演賞を受賞
- 2018.07.26「物語の始まりへ」に杉野優海さんが紹介されました
- 2018.06.25「物語の始まりへ」に上村那智さんが紹介されました
研究紹介
RESEARCH
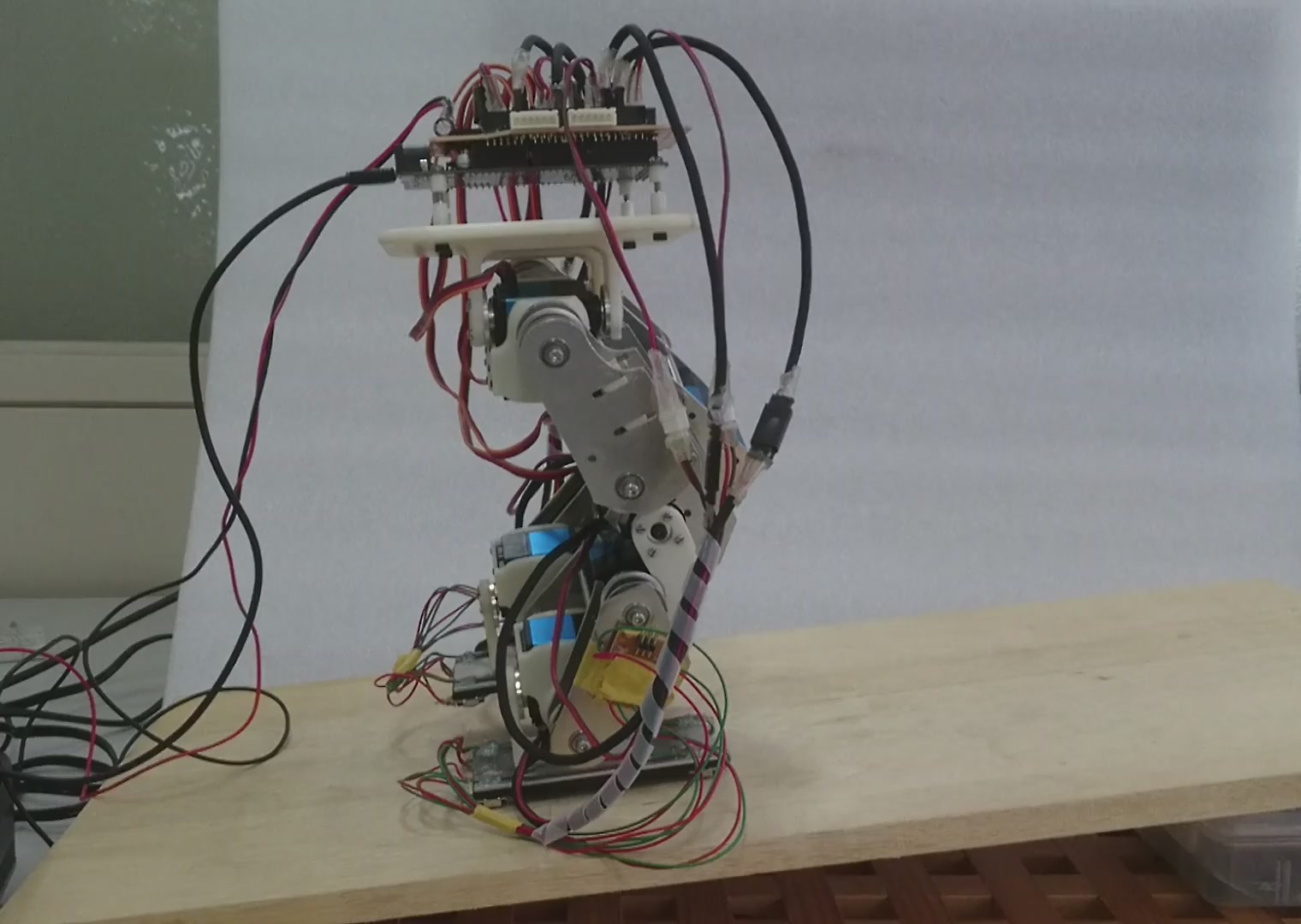
内界センサを用いた二足歩行ロボットの姿勢制御に関する研究
研究内容
ロボットの姿勢変化を検出するセンサを用いずに,床面の傾斜など環境変化によって生じるロボットの内部状態の変化(関節トルクの変化)に基づいて姿勢制御を実現する.加速度センサ等と姿勢変化を検出するセンサと併用することで冗長性を確保した姿勢制御を実現する.写真は傾斜面をバランスを保ちながら登っている様子.ロボットは,3Dプリンタ等を有する本学の夢考房の施設を活用し制作したものである.
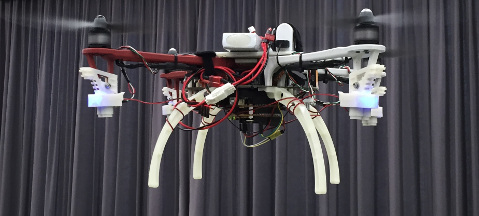
ドローンによる3次元ガス源探索
研究内容
プラントの保守点検,森林火災の巡回監視など,3次元的に拡散するガス・匂いを計測し,濃度勾配に基づいて,その発生源へロボットを誘導するガス源探索アルゴリズムの研究を行っている.写真はドローン(クアッドコプタ)の各ロータの直下にガスセンサを配置することで,ドローン自身が作る気流を利用してガスの到来方向を推定する独自のインロータ型のセンサアレイを持つガス源探索ドローンである.
教員紹介
TEACHERS

竹井義法 教授・博士(工学)
略歴
専門分野
専門:化学センサシステム、システム同定、ガス源探索ロボット、筋電義手、生活支援ロボット
学生へのメッセージ
嗅覚を持つロボットや筋電義手等、様々な課題に取り組んでいます。最近は、農業支援に関するロボットやセンサシステムの開発にもチャレンジしています。農業支援ロボット開発プロジェクトを担当しています(メンバー募集中)。2021年度、学科を超えたメンバーと活動中です。今年は白山麓キャンパスの苺圃場での実験も開始します。
担当科目
ロボティクスキャリアデザイン ロボティクス入門 プロジェクトデザイン入門(実験)(ロボティクス学科) 工業概論 ロボティクス専門実験・演習A プロジェクトデザインⅢ(竹井義法研究室) 信号処理 イノベーション基礎 知的システム制御工学研究(竹井義法) 生体信号計測特論(後学期冬) システム同定特論(後学期秋)
研究業績
RESEARCH RESULTS
論文
- 茎内水分量変動計測センサの温度による挙動の分析及び「温度依存軽減手法の提案
- オーバーサンプリングを用いた確率共鳴現象における信号検出感度の向上
- Development of 3D Gas Source Localization Using Multi-copter with Gas Sensor Array
- Visualization of Radiation Dose Distribution Utilizing Radiophotoluminescence in Glass Dosimeter
- 複数センサにより取得した室内大気環境変動に基づく居住者の生活パターン分類
- 水晶振動子式ニオイセンサシステムの機能設計と開発に関するレヴュー
- Monitoring of Radiation Dose Distribution Utilizing RPL in Glass Dosimeter-Its application to Radioactive Emergency Sensing-
- 非線形素子を用いた筋電アンプによる手関節動作の検出
詳しい研究業績はこちら