情報理工学部 情報工学科
中沢実 研究室
NAKAZAWA Minoru
LABORATORY
モバイル・クラウド・ロボットによるユビキタス的共生空間を追求する

インターネット社会は人を中心としたコミュニティとして拡がり、大きく発展を遂げた。ロボット・家電製品・各種センサーなど、その活用範囲はさらに拡大している。研究室では、人とロボットによるユビキタス的共生空間を構築するため、センサーネットワーク技術・画像処理技術・ロボット技術など広範囲な領域を研究している。
キーワード
- ブレインマシンインタフェース
- コンテクストアウェアネス
- マルチモーダルAI
- クラウドコンピューティング
- IoT
ニュース&トピックス
NEWS & TOPICS
- 2026.05.07中沢研究室が金沢機工株式会社と共同で、二足歩行ヒューマノイドロボットを活用した研究プロジェクトを開始
- 2026.04.21「物語の始まりへ」に松村拓洋さんが紹介されました
- 2026.04.20金沢工業大学セミナー・ワークショップ・出展情報
- 2026.03.31「物語の始まりへ」に志田愛斗さんが紹介されました
- 2026.03.24「物語の始まりへ」に坂下水彩さんが紹介されました
- 2026.03.17「物語の始まりへ」に田和広大さんが紹介されました
- 2026.03.10「物語の始まりへ」に山本航輝さんが紹介されました
- 2026.02.28【Gemini 3 Hackathon Tokyo 2026で優勝】
- 2026.02.16『文藝春秋』2026年3月号の「KITキャンパスレポート」に志田愛斗さんが紹介されました
- 2026.01.10【NHK Eテレ「沼にハマってきいてみた」1月17日20時から】
- 2025.11.18【国際ロボット展2025に情報工学科 中沢実研究室が出展】
- 2025.11.13国内最大級のハッカソンイベントで金沢工業大学から参加したチームが審査委員特別賞に入賞
- 2025.11.11田和広大さんと坂下水彩さんが情報処理学会マルチメディア通信と分散処理ワークショップでダブル受賞
- 2025.07.11質問者の感情も機械学習で分析し、音声や表情で回答。 進化したAIエージェント「AI沢みのり」
- 2025.04.03AIエージェント「AI沢みのり」を4月27日のオープンキャンパスで初公開
- 2025.03.04【スマートファクトリーに向けた産学共同研究の成果】
- 2025.01.294年生の大田 皐介さんが将棋AIにおける指し手の意図の解釈向上手法を提案
- 2025.01.294年生の吾妻慶伍さんが脳波を用いた視覚フィードバックで英語の訛りを効果的に学習できるシステムを提案
- 2025.01.284年生の花房青空さんがメロディから伴奏を自動生成するシステムを深層学習で実現
- 2025.01.18アピラクさんBest Session Presentation Awardを受賞
- 2024.08.23大学院のアピラク・サンゲンチャイさんが国際会議 IWMCA2024で最優秀論文賞受賞
- 2024.05.07「物語の始まりへ」に市村凌久さんが紹介されました
- 2024.04.16「物語の始まりへ」に渡辺魁さんが紹介されました
- 2024.04.09「物語の始まりへ」に中野勝章さんが紹介されました
- 2024.02.15【学部4年次に取り組んだ研究が情報処理学会論文誌に採録】
- 2024.02.14脳波を用いた痛み部位の客観的推定で90%前後の正解率を達成。金沢工業大学情報工学科の卒業研究で
- 2024.01.11情報工学専攻の中野 勝章さんがBest Session Presentation Award受賞
- 2023.11.08大学院情報工学専攻の中野勝章さんがDPSWS2023で「優秀プレゼンテーション賞」を受賞
- 2023.11.06Location-based AR基盤開発の最新成果を2023国際ロボット展でデモ
- 2023.10.31米国RIT主催の大学対抗疑似サイバー攻撃コンテストに情報工学の大学院生・学部生が初挑戦
- 2023.08.25大学院生の中野勝章さんと渡辺魁さん、中沢実教授の共著論文が情報処理学会論文誌で「特選論文」として表彰
- 2023.02.07「物語の始まりへ」に常田友貴さんが紹介されました
- 2022.11.07Joseph Anthony Zonghiさんが「KIT-RITデュアルディグリープログラム」を修了
- 2022.11.02大学院生の常田友貴さんが、DPSWS2022で「優秀プレゼンテーション賞」を受賞
- 2021.10.11交差点における方向別交通量のAI自動計測装置「携帯型トラモビAI」の実証実験を実施
- 2019.02.12「物語の始まりへ」に山下正人さんが紹介されました
- 2018.11.09「DPSWS2018」で山下正人さんが最優秀論文賞、高田裕也さんが優秀デモンストレーション賞を受賞
研究紹介
RESEARCH
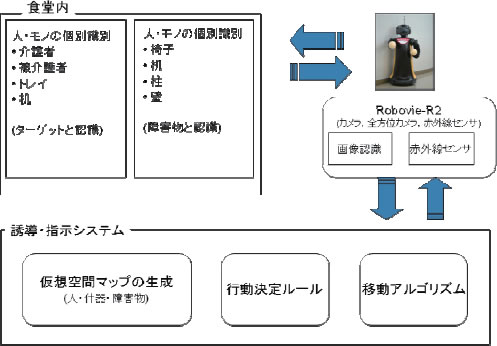
視覚情報を用いた配膳ロボットの適応移動制御技術の開発
研究内容
病院などの建物内において、医療従事者の負担を減らすことを前提として、食事や薬品の運搬をロボットに行わせることを目的としている。その際、ロボットの移動制御に重要な要素であるロボットと障害物(人,もの,壁)との衝突を防ぎ、行動生成を行うためにロボットの室内での空間的な位置情報を特定することを目的としている。
ブロードバンドインターネットミドルウェアの研究
ユビキタス環境における自律的ネットワーク制御システム
P2P型マルチキャストビデオオンデマンドシステム
教員紹介
TEACHERS

中沢実 教授・博士(工学)
略歴
専門分野
専門:パターン認識、ロボット、ネットワーク
学生へのメッセージ
学生と会話することが大事だと思っており、研究室でのゼミ時間を何よりも楽しみだと考えています。また、授業でも、どのようにして学生に話をしてもらうか?いろいろと工夫を凝らしています。情報工学は一種デジタルのための技術ですが、教育はあくまでもアナログ的な要素も必要と考えています。
いまや情報工学は全ての学生が学ぶべき事項として世間ではよく言われていますが、これは以前から言われていることです。情報工学科で学ぶ学生は、さらにその一歩先を進んでいる必要があります。これは長らく情報工学科の教員をやっていますが経験だけでは感ずることは難しいです。学生である皆さんと一緒に次のステップを作っていけるように一緒に考えていきましょう。
担当科目
分散システム 情報工学専門実験・演習A プロジェクトデザインⅢ(中沢実研究室) イノベーション基礎 情報通信研究(中沢 実) IoT特論 グローバルイノベーション特論 グローバルイノベーション特論
研究業績
RESEARCH RESULTS
論文
- SUPPORTING INCLUSIVE TEACHING WITH AI: MULTIMODAL CLASSROOM ENGAGEMENT MONITORING IN SCHOOLS IN JAPAN
- 局面に対応したコメント検索を用いた大規模言語モデルによる将棋解説文生成
- 3DLiDAR による交差点における歩行者・車両のトラッキングシステムの提案と評価
- Comparative Study of Recognition for Student Attention Analysis: YOLO-Based Face Detection in Classroom Environments
- Smart Warehouse Safety: Computer Vision for Forklift Driver Monitoring in Warehouse Setting
- グラフ表現による将棋 AI の指し手の判断根拠の可視化手法
- LogicLocking による FPGA 回路の階層的な保護を目的とした回路設計情報難読化の提案
- YOLOを基盤とした軽量かつ実用性の高いユニバーサル病変検出器の提案
詳しい研究業績はこちら